![]() VR型ステッピングモーターのアニメ
VR型ステッピングモーターのアニメ
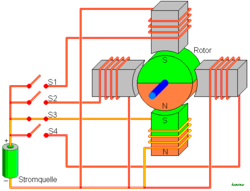 PM型ステッピングモーターの駆動回路の模式図
PM型ステッピングモーターの駆動回路の模式図
 ステッピングモーター
ステッピングモーター
ステッピングモーター(Stepper motor)は、ドライバを介して直流のパルス電圧を印加して駆動するモーターである。したがってパルスモーター(Pulse motor)ともいわれる。簡単な回路構成で、正確な位置決め制御を実現できるので、装置の位置決めを行う場合などによく使われる。
特徴
- 運動量が駆動パルスの数に比例する。
- デジタル制御回路との相性が良い。
- フィードバック回路の必要性がない(開ループ制御)。
- エネルギー効率が低い。
- 負荷が大きすぎたり、パルス周波数が高すぎると同期外れで誤動作につながる。この状態を「脱調」と呼び、加減速シーケンスを用いると改善することがある。
回転子の種類
- Permanent Magnet Type (PM型:永久磁石形)
- 回転子として、円周上にNSNS…と交互に着磁した磁性体を使用する。安価であるが、着磁間隔を細かくすることに限界があるので、ステップ角度は小さくできない。
- Variable Reluctance Type (VR型:歯車状鉄心形)
- 回転子として、歯車状の鉄心を使用する。ステップ角度を小さくできるが、トルクがやや低い。
- Hybrid Type (HB型:複合形)
- PM型とVR型の特徴を併せ持った構造である。PM型の場合は円周方向に着磁するが、HB型では軸方向に着磁した磁石を使用し、磁極側を二枚の歯車状鉄心で挟み込む。この時、N極側とS極側の歯の凸凹が逆になるようにする。
固定子の巻線構成
ステッピングモーターは、固定子に複数の巻線を用意しておき、電流を流す巻線を切り替えることによって動作させる。巻線構成としては二相(二組の巻線)のものが一般的であるが、三相、五相といったものもある。
ステッピングモーターの動作原理
PM型の簡略化したモデルを例にとって、動作原理を説明する。
- 巻線Aに電流を流すと、固定子と回転子のN・Sが引き合った状態になる。
- 巻線Bにも電流を流すと、両方の固定子が磁化して回転子を引きつけるので、力が釣り合うように45°回転する。
- 巻線Aの電流を切ると、さらに45°回転する。
- 巻線Aに先程と逆方向の電流を流すと、さらに45°回転する。
- 巻線Bの電流を切ると、さらに45°回転する。
- 巻線Bに先程と逆方向の電流を流すと、さらに45°回転する。
- 巻線Aの電流を切ると、さらに45°回転する。
- 巻線Aに最初と同じ方向の電流を流すと、さらに45°回転する。
以上のように、ステップ1から8を繰り返すことによって、一定の方向に回転する。
励磁モード
 各駆動方式の波形
各駆動方式の波形
ステッピングモーターは、巻線への電流の与え方を変えることにより、特性を変えることができる。二相型のモーターについて以下に述べる。
- 一相励磁
- 常に巻線一相のみに電流を流す。位置決め精度は良いが、減衰運動が残りやすい。
- 二相励磁
- 二相に電流を流す。一相励磁の約2倍の出力トルクが得られる。
- 一-二相励磁
- 一相と二相を交互に切り替えて電流を流す。一相励磁・二相励磁の場合のステップ角度の半分にすることができるので、滑らかな回転を得られる。前のセクションの説明図では、一-二相励磁を使っている。
- マイクロステップ駆動(バーニア駆動)
- 巻線への電流を単純なON/OFFではなく、二つの巻線の電流比率を細かく変えていくことで、より細かいステップ角度を得る手法。
運動形態
一般的な回転形のモーターの他に、直進形のモーター(リニアステッピング)も存在する。
用途例
- 産業用途
-
- コンピューター用途
- 古い磁気ディスク装置等のヘッド移動用トラッキングモーター
- 現在の製品はリニアモーターを埋め込みサーボで制御している。
- 一般家庭用途
-
- 航空機用途
-
- 自動車用途
-
-
- 自動車用計器
- 自動車や二輪車の計器に使用されることがあるが、これは正確さよりも演出を狙ったものである。
- デジタルカメラ
- レンズの移動に主にステッピングモーターが使用されている。ただし、携帯電話内蔵カメラのような小型のカメラモジュールではサイズの関係からリニアモーターが採用されていることも多い。
- パチンコ、パチスロ・スロット
- 回転軸を指定された角度で停止させることが可能なことから、パチンコ、パチスロ機やスロットマシンのリールに使用されている。
関連項目
外部リンク
|
|---|
|
|
| 基本型 | |
|---|
| DCモータ | |
|---|
AC SC 機械
整流子 | |
|---|
AC SC 電気
整流子 | |
|---|
| |
|---|
| AC 同期電動機(SM) | |
|---|
Special magnetic
machines | |
|---|
| 非磁性 | |
|---|
Enclosure Type | |
|---|
コンポーネントおよび
アクセサリー | |
|---|
| モーター制御器(英語版) | |
|---|
歴史, 教育,
レクリエーション利用 | |
|---|
| 未来的、, 実験的 | |
|---|
| 関連トピック | |
|---|
| 人物 | |
|---|
| 関連項目 | |
|---|
| |
|---|
 カテゴリ カテゴリ |











