![]() –Θ–Ω―Ä–Ψ―â―ë–Ϋ–Ϋ–Α―è ―¹―Ö–Β–Φ–Α –Α–±―¹―²―Ä–Α–Κ―²–Ϋ–Ψ–≥–Ψ –Α–≤―²–Ψ–Φ–Α―²–Α.
–Θ–Ω―Ä–Ψ―â―ë–Ϋ–Ϋ–Α―è ―¹―Ö–Β–Φ–Α –Α–±―¹―²―Ä–Α–Κ―²–Ϋ–Ψ–≥–Ψ –Α–≤―²–Ψ–Φ–Α―²–Α.
 βÄî –≤―Ö–Ψ–¥–Ϋ–Α―è –±―É–Κ–≤–Α, –Ω―Ä–Η–Ϋ–Α–¥–Μ–Β–Ε–Α―â–Α―è –Φ–Ϋ–Ψ–Ε–Β―¹―²–≤―É –≤―Ö–Ψ–¥–Ϋ–Ψ–≥–Ψ –Α–Μ―³–Α–≤–Η―²–Α
βÄî –≤―Ö–Ψ–¥–Ϋ–Α―è –±―É–Κ–≤–Α, –Ω―Ä–Η–Ϋ–Α–¥–Μ–Β–Ε–Α―â–Α―è –Φ–Ϋ–Ψ–Ε–Β―¹―²–≤―É –≤―Ö–Ψ–¥–Ϋ–Ψ–≥–Ψ –Α–Μ―³–Α–≤–Η―²–Α 
 βÄî –≤―΄―Ö–Ψ–¥–Ϋ–Α―è –±―É–Κ–≤–Α, –Ω―Ä–Η–Ϋ–Α–¥–Μ–Β–Ε–Α―â–Α―è –Φ–Ϋ–Ψ–Ε–Β―¹―²–≤―É –≤―΄―Ö–Ψ–¥–Ϋ–Ψ–≥–Ψ –Α–Μ―³–Α–≤–Η―²–Α
βÄî –≤―΄―Ö–Ψ–¥–Ϋ–Α―è –±―É–Κ–≤–Α, –Ω―Ä–Η–Ϋ–Α–¥–Μ–Β–Ε–Α―â–Α―è –Φ–Ϋ–Ψ–Ε–Β―¹―²–≤―É –≤―΄―Ö–Ψ–¥–Ϋ–Ψ–≥–Ψ –Α–Μ―³–Α–≤–Η―²–Α 
 βÄî –≤–Ϋ―É―²―Ä–Β–Ϋ–Ϋ–Β–Β ―¹–Ψ―¹―²–Ψ―è–Ϋ–Η–Β, –Ψ–¥–Ϋ–Ψ –Η–Ζ –Φ–Ϋ–Ψ–Ε–Β―¹―²–≤–Α –≤–Ϋ―É―²―Ä–Β–Ϋ–Ϋ–Η―Ö ―¹–Ψ―¹―²–Ψ―è–Ϋ–Η–Ι
βÄî –≤–Ϋ―É―²―Ä–Β–Ϋ–Ϋ–Β–Β ―¹–Ψ―¹―²–Ψ―è–Ϋ–Η–Β, –Ψ–¥–Ϋ–Ψ –Η–Ζ –Φ–Ϋ–Ψ–Ε–Β―¹―²–≤–Α –≤–Ϋ―É―²―Ä–Β–Ϋ–Ϋ–Η―Ö ―¹–Ψ―¹―²–Ψ―è–Ϋ–Η–Ι 
–ö–Ψ–Ϋ–ΒΧ¹―΅–Ϋ―΄–Ι –Α–≤―²–Ψ–Φ–ΑΧ¹―² (–ö–ê) –≤ ―²–Β–Ψ―Ä–Η–Η –Α–Μ–≥–Ψ―Ä–Η―²–Φ–Ψ–≤ βÄî –Φ–Α―²–Β–Φ–Α―²–Η―΅–Β―¹–Κ–Α―è –Α–±―¹―²―Ä–Α–Κ―Ü–Η―è, –Φ–Ψ–¥–Β–Μ―¨ –¥–Η―¹–Κ―Ä–Β―²–Ϋ–Ψ–≥–Ψ ―É―¹―²―Ä–Ψ–Ι―¹―²–≤–Α, –Η–Φ–Β―é―â–Β–≥–Ψ –Ψ–¥–Η–Ϋ –≤―Ö–Ψ–¥, –Ψ–¥–Η–Ϋ –≤―΄―Ö–Ψ–¥ –Η –≤ –Κ–Α–Ε–¥―΄–Ι –Φ–Ψ–Φ–Β–Ϋ―² –≤―Ä–Β–Φ–Β–Ϋ–Η –Ϋ–Α―Ö–Ψ–¥―è―â–Β–≥–Ψ―¹―è –≤ –Ψ–¥–Ϋ–Ψ–Φ ―¹–Ψ―¹―²–Ψ―è–Ϋ–Η–Η –Η–Ζ –Φ–Ϋ–Ψ–Ε–Β―¹―²–≤–Α –≤–Ψ–Ζ–Φ–Ψ–Ε–Ϋ―΄―Ö. –·–≤–Μ―è–Β―²―¹―è ―΅–Α―¹―²–Ϋ―΄–Φ ―¹–Μ―É―΅–Α–Β–Φ –Α–±―¹―²―Ä–Α–Κ―²–Ϋ–Ψ–≥–Ψ –¥–Η―¹–Κ―Ä–Β―²–Ϋ–Ψ–≥–Ψ –Α–≤―²–Ψ–Φ–Α―²–Α, ―΅–Η―¹–Μ–Ψ –≤–Ψ–Ζ–Φ–Ψ–Ε–Ϋ―΄―Ö –≤–Ϋ―É―²―Ä–Β–Ϋ–Ϋ–Η―Ö ―¹–Ψ―¹―²–Ψ―è–Ϋ–Η–Ι –Κ–Ψ―²–Ψ―Ä–Ψ–≥–Ψ –Κ–Ψ–Ϋ–Β―΅–Ϋ–Ψ.
–ü―Ä–Η ―Ä–Α–±–Ψ―²–Β –Ϋ–Α –≤―Ö–Ψ–¥ –ö–ê –Ω–Ψ―¹–Μ–Β–¥–Ψ–≤–Α―²–Β–Μ―¨–Ϋ–Ψ –Ω–Ψ―¹―²―É–Ω–Α―é―² –≤―Ö–Ψ–¥–Ϋ―΄–Β –≤–Ψ–Ζ–¥–Β–Ι―¹―²–≤–Η―è, –Α –Ϋ–Α –≤―΄―Ö–Ψ–¥–Β –ö–ê ―³–Ψ―Ä–Φ–Η―Ä―É–Β―² –≤―΄―Ö–Ψ–¥–Ϋ―΄–Β ―¹–Η–≥–Ϋ–Α–Μ―΄. –û–±―΄―΅–Ϋ–Ψ –Ω–Ψ–¥ –≤―Ö–Ψ–¥–Ϋ―΄–Φ–Η –≤–Ψ–Ζ–¥–Β–Ι―¹―²–≤–Η―è–Φ–Η –Ω―Ä–Η–Ϋ–Η–Φ–Α―é―² –Ω–Ψ–¥–Α―΅―É –Ϋ–Α –≤―Ö–Ψ–¥ –Α–≤―²–Ψ–Φ–Α―²–Α ―¹–Η–Φ–≤–Ψ–Μ–Ψ–≤ –Ψ–¥–Ϋ–Ψ–≥–Ψ –Α–Μ―³–Α–≤–Η―²–Α, –Α –Ϋ–Α –≤―΄―Ö–Ψ–¥ –ö–ê –≤ –Ω―Ä–Ψ―Ü–Β―¹―¹–Β ―Ä–Α–±–Ψ―²―΄ –≤―΄–¥–Α―ë―² ―¹–Η–Φ–≤–Ψ–Μ―΄ –≤ –Ψ–±―â–Β–Φ ―¹–Μ―É―΅–Α–Β –¥―Ä―É–≥–Ψ–≥–Ψ, –≤–Ψ–Ζ–Φ–Ψ–Ε–Ϋ–Ψ –¥–Α–Ε–Β –Ϋ–Β –Ω–Β―Ä–Β―¹–Β–Κ–Α―é―â–Β–≥–Ψ―¹―è ―¹–Ψ –≤―Ö–Ψ–¥–Ϋ―΄–Φ, –Α–Μ―³–Α–≤–Η―²–Α.
–ü–Ψ–Φ–Η–Φ–Ψ –Κ–Ψ–Ϋ–Β―΅–Ϋ―΄―Ö –Α–≤―²–Ψ–Φ–Α―²–Ψ–≤ ―¹―É―â–Β―¹―²–≤―É―é―² –Η –±–Β―¹–Κ–Ψ–Ϋ–Β―΅–Ϋ―΄–Β –¥–Η―¹–Κ―Ä–Β―²–Ϋ―΄–Β –Α–≤―²–Ψ–Φ–Α―²―΄ βÄî –Α–≤―²–Ψ–Φ–Α―²―΄ ―¹ –±–Β―¹–Κ–Ψ–Ϋ–Β―΅–Ϋ―΄–Φ ―΅–Η―¹–Μ–Ψ–Φ –≤–Ϋ―É―²―Ä–Β–Ϋ–Ϋ–Η―Ö ―¹–Ψ―¹―²–Ψ―è–Ϋ–Η–Ι.
–ü–Β―Ä–Β―Ö–Ψ–¥ –Η–Ζ –Ψ–¥–Ϋ–Ψ–≥–Ψ –≤–Ϋ―É―²―Ä–Β–Ϋ–Ϋ–Β–≥–Ψ ―¹–Ψ―¹―²–Ψ―è–Ϋ–Η―è –ö–ê –≤ –¥―Ä―É–≥–Ψ–Β –Φ–Ψ–Ε–Β―² –Ω―Ä–Ψ–Η―¹―Ö–Ψ–¥–Η―²―¨ –Ϋ–Β ―²–Ψ–Μ―¨–Κ–Ψ –Ψ―² –≤–Ϋ–Β―à–Ϋ–Β–≥–Ψ –≤–Ψ–Ζ–¥–Β–Ι―¹―²–≤–Η―è, –Ϋ–Ψ –Η ―¹–Α–Φ–Ψ–Ω―Ä–Ψ–Η–Ζ–≤–Ψ–Μ―¨–Ϋ–Ψ.
–†–Α–Ζ–Μ–Η―΅–Α―é―² –¥–Β―²–Β―Ä–Φ–Η–Ϋ–Η―Ä–Ψ–≤–Α–Ϋ–Ϋ―΄–Β –ö–ê βÄî –Α–≤―²–Ψ–Φ–Α―²―΄, –≤ –Κ–Ψ―²–Ψ―Ä―΄―Ö ―¹–Μ–Β–¥―É―é―â–Β–Β ―¹–Ψ―¹―²–Ψ―è–Ϋ–Η–Β –Ψ–¥–Ϋ–Ψ–Ζ–Ϋ–Α―΅–Ϋ–Ψ –Ψ–Ω―Ä–Β–¥–Β–Μ―è–Β―²―¹―è ―²–Β–Κ―É―â–Η–Φ ―¹–Ψ―¹―²–Ψ―è–Ϋ–Η–Β–Φ –Η –≤―Ö–Ψ–¥–Ϋ―΄–Φ ―¹–Η–Φ–≤–Ψ–Μ–Ψ–Φ –Η –≤―΄―Ö–Ψ–¥ –Ζ–Α–≤–Η―¹–Η―² ―²–Ψ–Μ―¨–Κ–Ψ –Ψ―² ―²–Β–Κ―É―â–Β–≥–Ψ ―¹–Ψ―¹―²–Ψ―è–Ϋ–Η―è –Η ―²–Β–Κ―É―â–Β–≥–Ψ –≤―Ö–Ψ–¥–Α, –Η –Ϋ–Β–¥–Β―²–Β―Ä–Φ–Η–Ϋ–Η―Ä–Ψ–≤–Α–Ϋ–Ϋ―΄–Β –ö–ê, ―¹–Μ–Β–¥―É―é―â–Β–Β ―¹–Ψ―¹―²–Ψ―è–Ϋ–Η–Β ―É –Κ–Ψ―²–Ψ―Ä―΄―Ö –≤ –Ψ–±―â–Β–Φ ―¹–Μ―É―΅–Α–Β –Ϋ–Β –Ψ–Ω―Ä–Β–¥–Β–Μ–Β–Ϋ–Ψ –Η, ―¹–Ψ–Ψ―²–≤–Β―²―¹―²–≤–Β–Ϋ–Ϋ–Ψ, –Ϋ–Β –Ψ–Ω―Ä–Β–¥–Β–Μ―ë–Ϋ –≤―΄―Ö–Ψ–¥–Ϋ–Ψ–Ι ―¹–Η–≥–Ϋ–Α–Μ. –ï―¹–Μ–Η –Ω–Β―Ä–Β―Ö–Ψ–¥ –≤ –Ω–Ψ―¹–Μ–Β–¥―É―é―â–Η–Β ―¹–Ψ―¹―²–Ψ―è–Ϋ–Η―è –Ω―Ä–Ψ–Η―¹―Ö–Ψ–¥–Η―² ―¹ –Ϋ–Β–Κ–Ψ―²–Ψ―Ä―΄–Φ–Η –≤–Β―Ä–Ψ―è―²–Ϋ–Ψ―¹―²―è–Φ–Η, ―²–Ψ ―²–Α–Κ–Ψ–Ι –ö–ê –Ϋ–Α–Ζ―΄–≤–Α―é―² –≤–Β―Ä–Ψ―è―²–Ϋ–Ψ―¹―²–Ϋ―΄–Φ –ö–ê.
–ü―Ä–Η–Φ–Β―Ä–Α–Φ–Η ―³–Η–Ζ–Η―΅–Β―¹–Κ–Ψ–Ι ―Ä–Β–Α–Μ–Η–Ζ–Α―Ü–Η–Η –ö–ê –Φ–Ψ–≥―É―² ―¹–Μ―É–Ε–Η―²―¨ –Μ―é–±―΄–Β ―Ü–Η―³―Ä–Ψ–≤―΄–Β ―¹–Η―¹―²–Β–Φ―΄, –Ϋ–Α–Ω―Ä–Η–Φ–Β―Ä, –Κ–Ψ–Φ–Ω―¨―é―²–Β―Ä―΄ –Η–Μ–Η –Ϋ–Β–Κ–Ψ―²–Ψ―Ä―΄–Β –Μ–Ψ–≥–Η―΅–Β―¹–Κ–Η–Β ―É–Ζ–Μ―΄ –Κ–Ψ–Φ–Ω―¨―é―²–Β―Ä–Ψ–≤ ―¹ –Ω–Α–Φ―è―²―¨―é βÄî ―²―Ä–Η–≥–≥–Β―Ä―΄ –Η –¥―Ä―É–≥–Η–Β ―É―¹―²―Ä–Ψ–Ι―¹―²–≤–Α. –ö–Ψ–Φ–±–Η–Ϋ–Α―Ü–Η–Ψ–Ϋ–Ϋ–Α―è –Ω–Ψ―¹–Μ–Β–¥–Ψ–≤–Α―²–Β–Μ―¨–Ϋ–Α―è –Μ–Ψ–≥–Η–Κ–Α –Ϋ–Β –Φ–Ψ–Ε–Β―² ―è–≤–Μ―è―²―¨―¹―è –ö–ê, ―²–Α–Κ –Κ–Α–Κ –Ϋ–Β –Η–Φ–Β–Β―² –≤–Ϋ―É―²―Ä–Β–Ϋ–Ϋ–Η―Ö ―¹–Ψ―¹―²–Ψ―è–Ϋ–Η–Ι (–Ϋ–Β –Η–Φ–Β–Β―² –Ω–Α–Φ―è―²–Η).
–Γ –Α–±―¹―²―Ä–Α–Κ―²–Ϋ–Ψ–Ι ―²–Ψ―΅–Κ–Η –Ζ―Ä–Β–Ϋ–Η―è –ö–ê –Η–Ζ―É―΅–Α–Β―²―¹―è ―Ä–Α–Ζ–¥–Β–Μ–Ψ–Φ –¥–Η―¹–Κ―Ä–Β―²–Ϋ–Ψ–Ι –Φ–Α―²–Β–Φ–Α―²–Η–Κ–Η βÄî ―²–Β–Ψ―Ä–Η―è –Κ–Ψ–Ϋ–Β―΅–Ϋ―΄―Ö –Α–≤―²–Ψ–Φ–Α―²–Ψ–≤.
–Δ–Β–Ψ―Ä–Η―è –Κ–Ψ–Ϋ–Β―΅–Ϋ―΄―Ö –Α–≤―²–Ψ–Φ–Α―²–Ψ–≤ –Ω―Ä–Α–Κ―²–Η―΅–Β―¹–Κ–Η ―à–Η―Ä–Ψ–Κ–Ψ –Η―¹–Ω–Ψ–Μ―¨–Ζ―É–Β―²―¹―è, –Ϋ–Α–Ω―Ä–Η–Φ–Β―Ä, –≤ ―¹–Η–Ϋ―²–Α–Κ―¹–Η―΅–Β―¹–Κ–Η―Ö –Η –Μ–Β–Κ―¹–Η―΅–Β―¹–Κ–Η―Ö –Α–Ϋ–Α–Μ–Η–Ζ–Α―²–Ψ―Ä–Α―Ö, ―²–Β―¹―²–Η―Ä–Ψ–≤–Α–Ϋ–Η–Η –Ω―Ä–Ψ–≥―Ä–Α–Φ–Φ–Ϋ–Ψ–≥–Ψ –Ψ–±–Β―¹–Ω–Β―΅–Β–Ϋ–Η―è –Ϋ–Α –Ψ―¹–Ϋ–Ψ–≤–Β –Φ–Ψ–¥–Β–Μ–Β–Ι.
–Λ–Ψ―Ä–Φ–Α–Μ―¨–Ϋ–Ψ–Β –Ψ–Ω–Η―¹–Α–Ϋ–Η–Β –Κ–Ψ–Ϋ–Β―΅–Ϋ–Ψ–≥–Ψ –Α–≤―²–Ψ–Φ–Α―²–Α
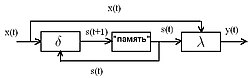 –û–±–Ψ–±―â―ë–Ϋ–Ϋ–Α―è ―³―É–Ϋ–Κ―Ü–Η–Ψ–Ϋ–Α–Μ―¨–Ϋ–Α―è ―¹―Ö–Β–Φ–Α –Α–±―¹―²―Ä–Α–Κ―²–Ϋ–Ψ–≥–Ψ –Α–≤―²–Ψ–Φ–Α―²–Α. ¬Ϊ–ü–Α–Φ―è―²―¨¬Μ βÄî ―ç―²–Ψ ―¹–Ψ–≤–Ψ–Κ―É–Ω–Ϋ–Ψ―¹―²―¨ –≤–Ϋ―É―²―Ä–Β–Ϋ–Ϋ–Η―Ö ―¹–Ψ―¹―²–Ψ―è–Ϋ–Η–Ι.
–û–±–Ψ–±―â―ë–Ϋ–Ϋ–Α―è ―³―É–Ϋ–Κ―Ü–Η–Ψ–Ϋ–Α–Μ―¨–Ϋ–Α―è ―¹―Ö–Β–Φ–Α –Α–±―¹―²―Ä–Α–Κ―²–Ϋ–Ψ–≥–Ψ –Α–≤―²–Ψ–Φ–Α―²–Α. ¬Ϊ–ü–Α–Φ―è―²―¨¬Μ βÄî ―ç―²–Ψ ―¹–Ψ–≤–Ψ–Κ―É–Ω–Ϋ–Ψ―¹―²―¨ –≤–Ϋ―É―²―Ä–Β–Ϋ–Ϋ–Η―Ö ―¹–Ψ―¹―²–Ψ―è–Ϋ–Η–Ι.
 βÄî ―²–Β–Κ―É―â–Β–Β ―¹–Ψ―¹―²–Ψ―è–Ϋ–Η–Β;
βÄî ―²–Β–Κ―É―â–Β–Β ―¹–Ψ―¹―²–Ψ―è–Ϋ–Η–Β;
 βÄî ―¹–Μ–Β–¥―É―é―â–Β–Β ―¹–Ψ―¹―²–Ψ―è–Ϋ–Η–Β.
βÄî ―¹–Μ–Β–¥―É―é―â–Β–Β ―¹–Ψ―¹―²–Ψ―è–Ϋ–Η–Β.
–û–±―â–Β–Β ―³–Ψ―Ä–Φ–Α–Μ―¨–Ϋ–Ψ–Β –Ψ–Ω–Η―¹–Α–Ϋ–Η–Β
–Λ–Ψ―Ä–Φ–Α–Μ―¨–Ϋ–Ψ –ö–ê –Ψ–Ω―Ä–Β–¥–Β–Μ―è–Β―²―¹―è –≤ –≤–Η–¥–Β ―É–Ω–Ψ―Ä―è–¥–Ψ―΅–Β–Ϋ–Ϋ–Ψ–Ι –Ω―è―²―ë―Ä–Κ–Η ―ç–Μ–Β–Φ–Β–Ϋ―²–Ψ–≤ –Ϋ–Β–Κ–Ψ―²–Ψ―Ä―΄―Ö –Φ–Ϋ–Ψ–Ε–Β―¹―²–≤:

- –≥–¥–Β βÄî –Κ–Ψ–Ϋ–Β―΅–Ϋ–Ψ–Β –Φ–Ϋ–Ψ–Ε–Β―¹―²–≤–Ψ ―¹–Ψ―¹―²–Ψ―è–Ϋ–Η–Ι –Α–≤―²–Ψ–Φ–Α―²–Α;
 βÄî –Κ–Ψ–Ϋ–Β―΅–Ϋ―΄–Β –≤―Ö–Ψ–¥–Ϋ–Ψ–Ι –Η –≤―΄―Ö–Ψ–¥–Ϋ–Ψ–Ι –Α–Μ―³–Α–≤–Η―²―΄ ―¹–Ψ–Ψ―²–≤–Β―²―¹―²–≤–Β–Ϋ–Ϋ–Ψ, –Η–Ζ –Κ–Ψ―²–Ψ―Ä―΄―Ö ―³–Ψ―Ä–Φ–Η―Ä―É―é―²―¹―è ―¹―²―Ä–Ψ–Κ–Η, ―¹―΅–Η―²―΄–≤–Α–Β–Φ―΄–Β –Η –≤―΄–¥–Α–≤–Α–Β–Φ―΄–Β –Α–≤―²–Ψ–Φ–Α―²–Ψ–Φ;
βÄî –Κ–Ψ–Ϋ–Β―΅–Ϋ―΄–Β –≤―Ö–Ψ–¥–Ϋ–Ψ–Ι –Η –≤―΄―Ö–Ψ–¥–Ϋ–Ψ–Ι –Α–Μ―³–Α–≤–Η―²―΄ ―¹–Ψ–Ψ―²–≤–Β―²―¹―²–≤–Β–Ϋ–Ϋ–Ψ, –Η–Ζ –Κ–Ψ―²–Ψ―Ä―΄―Ö ―³–Ψ―Ä–Φ–Η―Ä―É―é―²―¹―è ―¹―²―Ä–Ψ–Κ–Η, ―¹―΅–Η―²―΄–≤–Α–Β–Φ―΄–Β –Η –≤―΄–¥–Α–≤–Α–Β–Φ―΄–Β –Α–≤―²–Ψ–Φ–Α―²–Ψ–Φ; βÄî ―³―É–Ϋ–Κ―Ü–Η―è –Ω–Β―Ä–Β―Ö–Ψ–¥–Ψ–≤;
βÄî ―³―É–Ϋ–Κ―Ü–Η―è –Ω–Β―Ä–Β―Ö–Ψ–¥–Ψ–≤; βÄî ―³―É–Ϋ–Κ―Ü–Η―è –≤―΄―Ö–Ψ–¥–Ψ–≤.
βÄî ―³―É–Ϋ–Κ―Ü–Η―è –≤―΄―Ö–Ψ–¥–Ψ–≤.
–ê–±―¹―²―Ä–Α–Κ―²–Ϋ―΄–Ι –Α–≤―²–Ψ–Φ–Α―² ―¹ –Ϋ–Β–Κ–Ψ―²–Ψ―Ä―΄–Φ –≤―΄–¥–Β–Μ–Β–Ϋ–Ϋ―΄–Φ ―¹–Ψ―¹―²–Ψ―è–Ϋ–Η–Β–Φ  (―ç―²–Ψ ―¹–Ψ―¹―²–Ψ―è–Ϋ–Η–Β –Ϋ–Α–Ζ―΄–≤–Α―é―² –Ϋ–Α―΅–Α–Μ―¨–Ϋ―΄–Φ ―¹–Ψ―¹―²–Ψ―è–Ϋ–Η–Β–Φ) –Ϋ–Α–Ζ―΄–≤–Α–Β―²―¹―è –Η–Ϋ–Η―Ü–Η–Α–Μ―¨–Ϋ―΄–Φ –Α–≤―²–Ψ–Φ–Α―²–Ψ–Φ. –Δ–Α–Κ –Κ–Α–Κ –Κ–Α–Ε–¥―΄–Ι –ö–ê –Η–Φ–Β–Β―² –Κ–Ψ–Ϋ–Β―΅–Ϋ–Ψ–Β ―΅–Η―¹–Μ–Ψ ―¹–Ψ―¹―²–Ψ―è–Ϋ–Η–Ι, –Η –Μ―é–±–Ψ–Β –Η–Ζ –Β–≥–Ψ ―¹–Ψ―¹―²–Ψ―è–Ϋ–Η–Ι –Φ–Ψ–Ε–Β―² –±―΄―²―¨ –Ϋ–Α–Ζ–Ϋ–Α―΅–Β–Ϋ–Ψ –Ϋ–Α―΅–Α–Μ―¨–Ϋ―΄–Φ ―¹–Ψ―¹―²–Ψ―è–Ϋ–Η–Β–Φ, –Ψ–¥–Ϋ–Ψ–Φ―É –Η ―²–Ψ–Φ―É –Ε–Β –Α–≤―²–Ψ–Φ–Α―²―É ―¹–Ψ–Ψ―²–≤–Β―²―¹―²–≤―É–Β―²
(―ç―²–Ψ ―¹–Ψ―¹―²–Ψ―è–Ϋ–Η–Β –Ϋ–Α–Ζ―΄–≤–Α―é―² –Ϋ–Α―΅–Α–Μ―¨–Ϋ―΄–Φ ―¹–Ψ―¹―²–Ψ―è–Ϋ–Η–Β–Φ) –Ϋ–Α–Ζ―΄–≤–Α–Β―²―¹―è –Η–Ϋ–Η―Ü–Η–Α–Μ―¨–Ϋ―΄–Φ –Α–≤―²–Ψ–Φ–Α―²–Ψ–Φ. –Δ–Α–Κ –Κ–Α–Κ –Κ–Α–Ε–¥―΄–Ι –ö–ê –Η–Φ–Β–Β―² –Κ–Ψ–Ϋ–Β―΅–Ϋ–Ψ–Β ―΅–Η―¹–Μ–Ψ ―¹–Ψ―¹―²–Ψ―è–Ϋ–Η–Ι, –Η –Μ―é–±–Ψ–Β –Η–Ζ –Β–≥–Ψ ―¹–Ψ―¹―²–Ψ―è–Ϋ–Η–Ι –Φ–Ψ–Ε–Β―² –±―΄―²―¨ –Ϋ–Α–Ζ–Ϋ–Α―΅–Β–Ϋ–Ψ –Ϋ–Α―΅–Α–Μ―¨–Ϋ―΄–Φ ―¹–Ψ―¹―²–Ψ―è–Ϋ–Η–Β–Φ, –Ψ–¥–Ϋ–Ψ–Φ―É –Η ―²–Ψ–Φ―É –Ε–Β –Α–≤―²–Ψ–Φ–Α―²―É ―¹–Ψ–Ψ―²–≤–Β―²―¹―²–≤―É–Β―²  –Η–Ϋ–Η―Ü–Η–Α–Μ―¨–Ϋ―΄―Ö –Α–≤―²–Ψ–Φ–Α―²–Ψ–≤, βÄî ―΅–Η―¹–Μ–Ψ –≤–Ϋ―É―²―Ä–Β–Ϋ–Ϋ–Η―Ö ―¹–Ψ―¹―²–Ψ―è–Ϋ–Η–Ι –ö–ê. –Δ–Α–Κ–Η–Φ –Ψ–±―Ä–Α–Ζ–Ψ–Φ, –Α–±―¹―²―Ä–Α–Κ―²–Ϋ―΄–Ι –ö–ê –Ψ–Ω―Ä–Β–¥–Β–Μ―è–Β―² ―¹–Β–Φ–Β–Ι―¹―²–≤–Ψ –Η–Ϋ–Η―Ü–Η–Α–Μ―¨–Ϋ―΄―Ö –Α–≤―²–Ψ–Φ–Α―²–Ψ–≤. –ï―¹–Μ–Η –Ϋ–Β ―É–Κ–Α–Ζ–Α–Ϋ–Ψ –Ϋ–Α―΅–Α–Μ―¨–Ϋ–Ψ–Β ―¹–Ψ―¹―²–Ψ―è–Ϋ–Η–Β, ―²–Ψ –Ω–Ψ–≤–Β–¥–Β–Ϋ–Η–Β –Α–≤―²–Ψ–Φ–Α―²–Α –≤―¹–Β–≥–¥–Α –Ϋ–Β–¥–Β―²–Β―Ä–Φ–Η–Ϋ–Η―Ä–Ψ–≤–Α–Ϋ–Ψ, –≤―΄―Ö–Ψ–¥–Ϋ–Ψ–Β ―¹–Μ–Ψ–≤–Ψ –Α–≤―²–Ψ–Φ–Α―²–Α –Ζ–Α–≤–Η―¹–Η―² –Ψ―² –Ϋ–Α―΅–Α–Μ―¨–Ϋ–Ψ–≥–Ψ ―¹–Ψ―¹―²–Ψ―è–Ϋ–Η―è, –Ω–Ψ―ç―²–Ψ–Φ―É –Ω–Ψ–Μ–Ϋ–Ψ–Β –¥–Β―²–Β―Ä–Φ–Η–Ϋ–Η―Ä–Ψ–≤–Α–Ϋ–Ϋ–Ψ–Β –Ψ–Ω–Η―¹–Α–Ϋ–Η–Β –Α–≤―²–Ψ–Φ–Α―²–Α –±―É–¥–Β―²[1]:
–Η–Ϋ–Η―Ü–Η–Α–Μ―¨–Ϋ―΄―Ö –Α–≤―²–Ψ–Φ–Α―²–Ψ–≤, βÄî ―΅–Η―¹–Μ–Ψ –≤–Ϋ―É―²―Ä–Β–Ϋ–Ϋ–Η―Ö ―¹–Ψ―¹―²–Ψ―è–Ϋ–Η–Ι –ö–ê. –Δ–Α–Κ–Η–Φ –Ψ–±―Ä–Α–Ζ–Ψ–Φ, –Α–±―¹―²―Ä–Α–Κ―²–Ϋ―΄–Ι –ö–ê –Ψ–Ω―Ä–Β–¥–Β–Μ―è–Β―² ―¹–Β–Φ–Β–Ι―¹―²–≤–Ψ –Η–Ϋ–Η―Ü–Η–Α–Μ―¨–Ϋ―΄―Ö –Α–≤―²–Ψ–Φ–Α―²–Ψ–≤. –ï―¹–Μ–Η –Ϋ–Β ―É–Κ–Α–Ζ–Α–Ϋ–Ψ –Ϋ–Α―΅–Α–Μ―¨–Ϋ–Ψ–Β ―¹–Ψ―¹―²–Ψ―è–Ϋ–Η–Β, ―²–Ψ –Ω–Ψ–≤–Β–¥–Β–Ϋ–Η–Β –Α–≤―²–Ψ–Φ–Α―²–Α –≤―¹–Β–≥–¥–Α –Ϋ–Β–¥–Β―²–Β―Ä–Φ–Η–Ϋ–Η―Ä–Ψ–≤–Α–Ϋ–Ψ, –≤―΄―Ö–Ψ–¥–Ϋ–Ψ–Β ―¹–Μ–Ψ–≤–Ψ –Α–≤―²–Ψ–Φ–Α―²–Α –Ζ–Α–≤–Η―¹–Η―² –Ψ―² –Ϋ–Α―΅–Α–Μ―¨–Ϋ–Ψ–≥–Ψ ―¹–Ψ―¹―²–Ψ―è–Ϋ–Η―è, –Ω–Ψ―ç―²–Ψ–Φ―É –Ω–Ψ–Μ–Ϋ–Ψ–Β –¥–Β―²–Β―Ä–Φ–Η–Ϋ–Η―Ä–Ψ–≤–Α–Ϋ–Ϋ–Ψ–Β –Ψ–Ω–Η―¹–Α–Ϋ–Η–Β –Α–≤―²–Ψ–Φ–Α―²–Α –±―É–¥–Β―²[1]:

–†–Α–Ζ–Μ–Η―΅–Α―é―² –¥–≤–Α –Κ–Μ–Α―¹―¹–Α –ö–ê: –Α–≤―²–Ψ–Φ–Α―²―΄ –€―É―Ä–Α βÄî –ö–ê, ―É –Κ–Ψ―²–Ψ―Ä―΄―Ö –≤―΄―Ö–Ψ–¥–Ϋ–Ψ–Ι ―¹–Η–≥–Ϋ–Α–Μ –Ζ–Α–≤–Η―¹–Η―² ―²–Ψ–Μ―¨–Κ–Ψ –Ψ―² –≤–Ϋ―É―²―Ä–Β–Ϋ–Ϋ–Β–≥–Ψ ―¹–Ψ―¹―²–Ψ―è–Ϋ–Η―è, –Ω–Ψ ―Ä–Η―¹―É–Ϋ–Κ―É ―É –Α–≤―²–Ψ–Φ–Α―²–Α –€―É―Ä–Α –Ϋ–Β―² ―¹–≤―è–Ζ–Η –Ψ―² –≤―Ö–Ψ–¥–Α  –Κ ―³―É–Ϋ–Κ―Ü–Η–Η –≤―΄―Ö–Ψ–¥–Α
–Κ ―³―É–Ϋ–Κ―Ü–Η–Η –≤―΄―Ö–Ψ–¥–Α  , –Η –Α–≤―²–Ψ–Φ–Α―²―΄ –€–Η–Μ–Η βÄî –≤―΄―Ö–Ψ–¥–Ϋ–Ψ–Ι ―¹–Η–≥–Ϋ–Α–Μ –Ζ–Α–≤–Η―¹–Η―² –Κ–Α–Κ –Ψ―² –≤–Ϋ―É―²―Ä–Β–Ϋ–Ϋ–Β–≥–Ψ ―¹–Ψ―¹―²–Ψ―è–Ϋ–Η―è, ―²–Α–Κ –Η –Ψ―² ―¹–Ψ―¹―²–Ψ―è–Ϋ–Η―è –≤―Ö–Ψ–¥–Α.
, –Η –Α–≤―²–Ψ–Φ–Α―²―΄ –€–Η–Μ–Η βÄî –≤―΄―Ö–Ψ–¥–Ϋ–Ψ–Ι ―¹–Η–≥–Ϋ–Α–Μ –Ζ–Α–≤–Η―¹–Η―² –Κ–Α–Κ –Ψ―² –≤–Ϋ―É―²―Ä–Β–Ϋ–Ϋ–Β–≥–Ψ ―¹–Ψ―¹―²–Ψ―è–Ϋ–Η―è, ―²–Α–Κ –Η –Ψ―² ―¹–Ψ―¹―²–Ψ―è–Ϋ–Η―è –≤―Ö–Ψ–¥–Α.
–û–±―â–Β–Β –Ψ–Ω–Η―¹–Α–Ϋ–Η–Β
–Γ―É―â–Β―¹―²–≤―É―é―² ―Ä–Α–Ζ–Μ–Η―΅–Ϋ―΄–Β ―¹–Ω–Ψ―¹–Ψ–±―΄ –Ζ–Α–¥–Α–Ϋ–Η―è –Α–Μ–≥–Ψ―Ä–Η―²–Φ–Α ―³―É–Ϋ–Κ―Ü–Η–Ψ–Ϋ–Η―Ä–Ψ–≤–Α–Ϋ–Η―è –Κ–Ψ–Ϋ–Β―΅–Ϋ–Ψ–≥–Ψ –Α–≤―²–Ψ–Φ–Α―²–Α. –ù–Α–Ω―Ä–Η–Φ–Β―Ä, –Κ–Ψ–Ϋ–Β―΅–Ϋ―΄–Ι –Α–≤―²–Ψ–Φ–Α―² –Φ–Ψ–Ε–Β―² –±―΄―²―¨ –Ζ–Α–¥–Α–Ϋ –≤ –≤–Η–¥–Β ―É–Ω–Ψ―Ä―è–¥–Ψ―΅–Β–Ϋ–Ϋ–Ψ–Ι –Ω―è―²―ë―Ä–Κ–Η ―ç–Μ–Β–Φ–Β–Ϋ―²–Ψ–≤ –Ϋ–Β–Κ–Ψ―²–Ψ―Ä―΄―Ö –Φ–Ϋ–Ψ–Ε–Β―¹―²–≤:

- –≥–¥–Β
 βÄî –≤―Ö–Ψ–¥–Ϋ–Ψ–Ι –Α–Μ―³–Α–≤–Η―² (–Κ–Ψ–Ϋ–Β―΅–Ϋ–Ψ–Β –Φ–Ϋ–Ψ–Ε–Β―¹―²–≤–Ψ –≤―Ö–Ψ–¥–Ϋ―΄―Ö ―¹–Η–Φ–≤–Ψ–Μ–Ψ–≤), –Η–Ζ –Κ–Ψ―²–Ψ―Ä–Ψ–≥–Ψ ―³–Ψ―Ä–Φ–Η―Ä―É―é―²―¹―è –≤―Ö–Ψ–¥–Ϋ―΄–Β ―¹–Μ–Ψ–≤–Α, –≤–Ψ―¹–Ω―Ä–Η–Ϋ–Η–Φ–Α–Β–Φ―΄–Β –Κ–Ψ–Ϋ–Β―΅–Ϋ―΄–Φ –Α–≤―²–Ψ–Φ–Α―²–Ψ–Φ;
βÄî –≤―Ö–Ψ–¥–Ϋ–Ψ–Ι –Α–Μ―³–Α–≤–Η―² (–Κ–Ψ–Ϋ–Β―΅–Ϋ–Ψ–Β –Φ–Ϋ–Ψ–Ε–Β―¹―²–≤–Ψ –≤―Ö–Ψ–¥–Ϋ―΄―Ö ―¹–Η–Φ–≤–Ψ–Μ–Ψ–≤), –Η–Ζ –Κ–Ψ―²–Ψ―Ä–Ψ–≥–Ψ ―³–Ψ―Ä–Φ–Η―Ä―É―é―²―¹―è –≤―Ö–Ψ–¥–Ϋ―΄–Β ―¹–Μ–Ψ–≤–Α, –≤–Ψ―¹–Ω―Ä–Η–Ϋ–Η–Φ–Α–Β–Φ―΄–Β –Κ–Ψ–Ϋ–Β―΅–Ϋ―΄–Φ –Α–≤―²–Ψ–Φ–Α―²–Ψ–Φ;
 βÄî –Φ–Ϋ–Ψ–Ε–Β―¹―²–≤–Ψ –≤–Ϋ―É―²―Ä–Β–Ϋ–Ϋ–Η―Ö ―¹–Ψ―¹―²–Ψ―è–Ϋ–Η–Ι;
βÄî –Φ–Ϋ–Ψ–Ε–Β―¹―²–≤–Ψ –≤–Ϋ―É―²―Ä–Β–Ϋ–Ϋ–Η―Ö ―¹–Ψ―¹―²–Ψ―è–Ϋ–Η–Ι; βÄî –Ϋ–Α―΅–Α–Μ―¨–Ϋ–Ψ–Β ―¹–Ψ―¹―²–Ψ―è–Ϋ–Η–Β
βÄî –Ϋ–Α―΅–Α–Μ―¨–Ϋ–Ψ–Β ―¹–Ψ―¹―²–Ψ―è–Ϋ–Η–Β  ;
; βÄî –Φ–Ϋ–Ψ–Ε–Β―¹―²–≤–Ψ –Ζ–Α–Κ–Μ―é―΅–Η―²–Β–Μ―¨–Ϋ―΄―Ö, –Η–Μ–Η –Κ–Ψ–Ϋ–Β―΅–Ϋ―΄―Ö ―¹–Ψ―¹―²–Ψ―è–Ϋ–Η–Ι
βÄî –Φ–Ϋ–Ψ–Ε–Β―¹―²–≤–Ψ –Ζ–Α–Κ–Μ―é―΅–Η―²–Β–Μ―¨–Ϋ―΄―Ö, –Η–Μ–Η –Κ–Ψ–Ϋ–Β―΅–Ϋ―΄―Ö ―¹–Ψ―¹―²–Ψ―è–Ϋ–Η–Ι  ;
; βÄî ―³―É–Ϋ–Κ―Ü–Η―è –Ω–Β―Ä–Β―Ö–Ψ–¥–Ψ–≤, –Ψ–Ω―Ä–Β–¥–Β–Μ―ë–Ϋ–Ϋ–Α―è –Κ–Α–Κ –Ψ―²–Ψ–±―Ä–Α–Ε–Β–Ϋ–Η–Β
βÄî ―³―É–Ϋ–Κ―Ü–Η―è –Ω–Β―Ä–Β―Ö–Ψ–¥–Ψ–≤, –Ψ–Ω―Ä–Β–¥–Β–Μ―ë–Ϋ–Ϋ–Α―è –Κ–Α–Κ –Ψ―²–Ψ–±―Ä–Α–Ε–Β–Ϋ–Η–Β  , ―²–Α–Κ–Ψ–Β, ―΅―²–Ψ
, ―²–Α–Κ–Ψ–Β, ―΅―²–Ψ  , ―²–Ψ –Β―¹―²―¨ –Ζ–Ϋ–Α―΅–Β–Ϋ–Η–Β ―³―É–Ϋ–Κ―Ü–Η–Η –Ω–Β―Ä–Β―Ö–Ψ–¥–Ψ–≤ –Ϋ–Α ―É–Ω–Ψ―Ä―è–¥–Ψ―΅–Β–Ϋ–Ϋ–Ψ–Ι –Ω–Α―Ä–Β (―¹–Ψ―¹―²–Ψ―è–Ϋ–Η–Β, –≤―Ö–Ψ–¥–Ϋ–Ψ–Ι ―¹–Η–Φ–≤–Ψ–Μ –Η–Μ–Η –Ω―É―¹―²–Α―è ―Ü–Β–Ω–Ψ―΅–Κ–Α ―¹–Η–Φ–≤–Ψ–Μ–Ψ–≤) –Β―¹―²―¨ –Φ–Ϋ–Ψ–Ε–Β―¹―²–≤–Ψ –≤―¹–Β―Ö ―¹–Ψ―¹―²–Ψ―è–Ϋ–Η–Ι, –≤ –Κ–Ψ―²–Ψ―Ä―΄–Β –Η–Ζ –¥–Α–Ϋ–Ϋ–Ψ–≥–Ψ ―¹–Ψ―¹―²–Ψ―è–Ϋ–Η―è –≤–Ψ–Ζ–Φ–Ψ–Ε–Β–Ϋ –Ω–Β―Ä–Β―Ö–Ψ–¥ –Ω–Ψ –¥–Α–Ϋ–Ϋ–Ψ–Φ―É –≤―Ö–Ψ–¥–Ϋ–Ψ–Φ―É ―¹–Η–Φ–≤–Ψ–Μ―É –Η–Μ–Η –Ω―É―¹―²–Ψ–Ι ―Ü–Β–Ω–Ψ―΅–Κ–Β ―¹–Η–Φ–≤–Ψ–Μ–Ψ–≤, –Ψ–±―΄―΅–Ϋ–Ψ –Ψ–±–Ψ–Ζ–Ϋ–Α―΅–Α–Β–Φ–Ψ–Ι –±―É–Κ–≤–Ψ–Ι
, ―²–Ψ –Β―¹―²―¨ –Ζ–Ϋ–Α―΅–Β–Ϋ–Η–Β ―³―É–Ϋ–Κ―Ü–Η–Η –Ω–Β―Ä–Β―Ö–Ψ–¥–Ψ–≤ –Ϋ–Α ―É–Ω–Ψ―Ä―è–¥–Ψ―΅–Β–Ϋ–Ϋ–Ψ–Ι –Ω–Α―Ä–Β (―¹–Ψ―¹―²–Ψ―è–Ϋ–Η–Β, –≤―Ö–Ψ–¥–Ϋ–Ψ–Ι ―¹–Η–Φ–≤–Ψ–Μ –Η–Μ–Η –Ω―É―¹―²–Α―è ―Ü–Β–Ω–Ψ―΅–Κ–Α ―¹–Η–Φ–≤–Ψ–Μ–Ψ–≤) –Β―¹―²―¨ –Φ–Ϋ–Ψ–Ε–Β―¹―²–≤–Ψ –≤―¹–Β―Ö ―¹–Ψ―¹―²–Ψ―è–Ϋ–Η–Ι, –≤ –Κ–Ψ―²–Ψ―Ä―΄–Β –Η–Ζ –¥–Α–Ϋ–Ϋ–Ψ–≥–Ψ ―¹–Ψ―¹―²–Ψ―è–Ϋ–Η―è –≤–Ψ–Ζ–Φ–Ψ–Ε–Β–Ϋ –Ω–Β―Ä–Β―Ö–Ψ–¥ –Ω–Ψ –¥–Α–Ϋ–Ϋ–Ψ–Φ―É –≤―Ö–Ψ–¥–Ϋ–Ψ–Φ―É ―¹–Η–Φ–≤–Ψ–Μ―É –Η–Μ–Η –Ω―É―¹―²–Ψ–Ι ―Ü–Β–Ω–Ψ―΅–Κ–Β ―¹–Η–Φ–≤–Ψ–Μ–Ψ–≤, –Ψ–±―΄―΅–Ϋ–Ψ –Ψ–±–Ψ–Ζ–Ϋ–Α―΅–Α–Β–Φ–Ψ–Ι –±―É–Κ–≤–Ψ–Ι 
–ü―Ä–Η –Α–Ϋ–Α–Μ–Η–Ζ–Β –ö–ê –Ω―Ä–Η–Ϋ―è―²–Ψ –Ω–Ψ–Μ–Α–≥–Α―²―¨, ―΅―²–Ψ –Κ–Ψ–Ϋ–Β―΅–Ϋ―΄–Ι –Α–≤―²–Ψ–Φ–Α―² –Ϋ–Α―΅–Η–Ϋ–Α–Β―² ―Ä–Α–±–Ψ―²―É –≤ –Ϋ–Β–Κ–Ψ―²–Ψ―Ä–Ψ–Φ –Ϋ–Α―΅–Α–Μ―¨–Ϋ–Ψ–Φ ―¹–Ψ―¹―²–Ψ―è–Ϋ–Η–Η , –Ω–Ψ―¹–Μ–Β–¥–Ψ–≤–Α―²–Β–Μ―¨–Ϋ–Ψ –Ω–Ψ–Μ―É―΅–Α–Β―² –Ω–Ψ –Ψ–¥–Ϋ–Ψ–Φ―É ―¹–Η–Φ–≤–Ψ–Μ―É –Η–Ζ –≤―Ö–Ψ–¥–Ϋ–Ψ–≥–Ψ ―¹–Μ–Ψ–≤–Α (―Ü–Β–Ω–Ψ―΅–Κ–Η –≤―Ö–Ψ–¥–Ϋ―΄―Ö ―¹–Η–Φ–≤–Ψ–Μ–Ψ–≤). –Γ―΅–Η―²–Α–Ϋ–Ϋ―΄–Ι ―¹–Η–Φ–≤–Ψ–Μ –Φ–Ψ–Ε–Β―² –Ω–Β―Ä–Β–≤–Β―¹―²–Η –Α–≤―²–Ψ–Φ–Α―² –≤ –Ϋ–Ψ–≤–Ψ–Β ―¹–Ψ―¹―²–Ψ―è–Ϋ–Η–Β –Η–Μ–Η –Ϋ–Β –Ω–Β―Ä–Β–≤–Β―¹―²–Η –≤ –Ϋ–Ψ–≤–Ψ–Β ―¹–Ψ―¹―²–Ψ―è–Ϋ–Η–Β –≤ ―¹–Ψ–Ψ―²–≤–Β―²―¹―²–≤–Η–Η ―¹ ―³―É–Ϋ–Κ―Ü–Η–Β–Ι –Ω–Β―Ä–Β―Ö–Ψ–¥–Ψ–≤.
–ü–Ψ–Μ―É―΅–Α―è –≤―Ö–Ψ–¥–Ϋ―É―é ―Ü–Β–Ω–Ψ―΅–Κ―É ―¹–Η–Φ–≤–Ψ–Μ–Ψ–≤ –Η –¥–Β–Μ–Α―è –Ω–Β―Ä–Β―Ö–Ψ–¥―΄ –Η–Ζ ―¹–Ψ―¹―²–Ψ―è–Ϋ–Η―è –≤ ―¹–Ψ―¹―²–Ψ―è–Ϋ–Η–Β, –Α–≤―²–Ψ–Φ–Α―² –Ω–Ψ―¹–Μ–Β –Ω–Ψ–Μ―É―΅–Β–Ϋ–Η―è –Ω–Ψ―¹–Μ–Β–¥–Ϋ–Β–≥–Ψ ―¹–Η–Φ–≤–Ψ–Μ–Α[–Ω―Ä–Ψ―è―¹–Ϋ–Η―²―¨] –≤―Ö–Ψ–¥–Ϋ–Ψ–≥–Ψ ―¹–Μ–Ψ–≤–Α –Ψ–Κ–Α–Ε–Β―²―¹―è –≤ –Ϋ–Β–Κ–Ψ―²–Ψ―Ä–Ψ–Φ ―¹–Ψ―¹―²–Ψ―è–Ϋ–Η–Η  .
.
–ï―¹–Μ–Η ―ç―²–Ψ ―¹–Ψ―¹―²–Ψ―è–Ϋ–Η–Β ―è–≤–Μ―è–Β―²―¹―è –Ζ–Α–Κ–Μ―é―΅–Η―²–Β–Μ―¨–Ϋ―΄–Φ, ―²–Ψ –≥–Ψ–≤–Ψ―Ä―è―², ―΅―²–Ψ –Α–≤―²–Ψ–Φ–Α―² –¥–Ψ–Ω―É―¹―²–Η–Μ ―¹–Μ–Ψ–≤–Ψ [–Ω―Ä–Ψ―è―¹–Ϋ–Η―²―¨]
–î―Ä―É–≥–Η–Β ―¹–Ω–Ψ―¹–Ψ–±―΄ –Ζ–Α–¥–Α–Ϋ–Η―è ―³―É–Ϋ–Κ―Ü–Η–Ψ–Ϋ–Η―Ä–Ψ–≤–Α–Ϋ–Η―è –ö–ê
–‰―¹―Ö–Ψ–¥–Ϋ–Ψ–Β
―¹–Ψ―¹―²–Ψ―è–Ϋ–Η–Β
|
–Γ–Μ–Β–¥―É―é―â–Β–Β ―¹–Ψ―¹―²–Ψ―è–Ϋ–Η–Β
|
–£―Ö–Ψ–¥–Ϋ–Ψ–Ι
―¹–Η–Φ–≤–Ψ–Μ a
|
–£―Ö–Ψ–¥–Ϋ–Ψ–Ι
―¹–Η–Φ–≤–Ψ–Μ b
|
–¦―é–±–Ψ–Ι
–¥―Ä―É–≥–Ψ–Ι
―¹–Η–Φ–≤–Ψ–Μ
|
| p0
|
p1
|
p0
|
p0
|
| p1
|
p1
|
p2
|
p1
|
| p2
|
p3
|
p4
|
p2
|
| p3
|
p3
|
p5
|
p3
|
| p4
|
p4
|
p4
|
p4
|
| p5
|
p3
|
p5
|
p5
|
- –î–Η–Α–≥―Ä–Α–Φ–Φ–Α ―¹–Ψ―¹―²–Ψ―è–Ϋ–Η–Ι (–Η–Μ–Η –Η–Ϋ–Ψ–≥–¥–Α –≥―Ä–Α―³ –Ω–Β―Ä–Β―Ö–Ψ–¥–Ψ–≤) βÄî –≥―Ä–Α―³–Η―΅–Β―¹–Κ–Ψ–Β –Ω―Ä–Β–¥―¹―²–Α–≤–Μ–Β–Ϋ–Η–Β –Φ–Ϋ–Ψ–Ε–Β―¹―²–≤–Α ―¹–Ψ―¹―²–Ψ―è–Ϋ–Η–Ι –Η ―³―É–Ϋ–Κ―Ü–Η–Η –Ω–Β―Ä–Β―Ö–Ψ–¥–Ψ–≤. –ü―Ä–Β–¥―¹―²–Α–≤–Μ―è–Β―² ―¹–Ψ–±–Ψ–Ι ―Ä–Α–Ζ–Φ–Β―΅–Β–Ϋ–Ϋ―΄–Ι –Ψ―Ä–Η–Β–Ϋ―²–Η―Ä–Ψ–≤–Α–Ϋ–Ϋ―΄–Ι –≥―Ä–Α―³, –≤–Β―Ä―à–Η–Ϋ―΄ –Κ–Ψ―²–Ψ―Ä–Ψ–≥–Ψ βÄî ―¹–Ψ―¹―²–Ψ―è–Ϋ–Η―è –ö–ê, –¥―É–≥–Η βÄî –Ω–Β―Ä–Β―Ö–Ψ–¥―΄ –Η–Ζ –Ψ–¥–Ϋ–Ψ–≥–Ψ ―¹–Ψ―¹―²–Ψ―è–Ϋ–Η―è –≤ –¥―Ä―É–≥–Ψ–Β, –Α –Φ–Β―²–Κ–Η –¥―É–≥ βÄî ―¹–Η–Φ–≤–Ψ–Μ―΄, –Ω–Ψ –Κ–Ψ―²–Ψ―Ä―΄–Φ –Ψ―¹―É―â–Β―¹―²–≤–Μ―è–Β―²―¹―è –Ω–Β―Ä–Β―Ö–Ψ–¥ –Η–Ζ –Ψ–¥–Ϋ–Ψ–≥–Ψ ―¹–Ψ―¹―²–Ψ―è–Ϋ–Η―è –≤ –¥―Ä―É–≥–Ψ–Β. –ï―¹–Μ–Η –Ω–Β―Ä–Β―Ö–Ψ–¥ –Η–Ζ ―¹–Ψ―¹―²–Ψ―è–Ϋ–Η―è q1 –≤ q2 –Φ–Ψ–Ε–Β―² –±―΄―²―¨ –Ψ―¹―É―â–Β―¹―²–≤–Μ―ë–Ϋ –Ω–Ψ –Ψ–¥–Ϋ–Ψ–Φ―É –Η–Ζ –Ϋ–Β―¹–Κ–Ψ–Μ―¨–Κ–Η―Ö ―¹–Η–Φ–≤–Ψ–Μ–Ψ–≤, ―²–Ψ –≤―¹–Β –Ψ–Ϋ–Η –¥–Ψ–Μ–Ε–Ϋ―΄ –±―΄―²―¨ –Ϋ–Α–¥–Ω–Η―¹–Α–Ϋ―΄ –Ϋ–Α–¥ –¥―É–≥–Ψ–Ι –¥–Η–Α–≥―Ä–Α–Φ–Φ―΄.
- –Δ–Α–±–Μ–Η―Ü–Α –Ω–Β―Ä–Β―Ö–Ψ–¥–Ψ–≤ βÄî ―²–Α–±–Μ–Η―΅–Ϋ–Ψ–Β –Ω―Ä–Β–¥―¹―²–Α–≤–Μ–Β–Ϋ–Η–Β ―³―É–Ϋ–Κ―Ü–Η–Η Έ¥. –û–±―΄―΅–Ϋ–Ψ –≤ ―²–Α–Κ–Ψ–Ι ―²–Α–±–Μ–Η―Ü–Β –Κ–Α–Ε–¥–Ψ–Ι ―¹―²―Ä–Ψ–Κ–Β ―¹–Ψ–Ψ―²–≤–Β―²―¹―²–≤―É–Β―² –Ψ–¥–Ϋ–Ψ ―¹–Ψ―¹―²–Ψ―è–Ϋ–Η–Β (–Η―¹―Ö–Ψ–¥–Ϋ–Ψ–Β –Η ―Ä–Β–Ζ―É–Μ―¨―²–Α―²–Ϋ–Ψ–Β), –Α ―¹―²–Ψ–Μ–±―Ü―É βÄî –Ψ–¥–Η–Ϋ –¥–Ψ–Ω―É―¹―²–Η–Φ―΄–Ι –≤―Ö–Ψ–¥–Ϋ–Ψ–Ι ―¹–Η–Φ–≤–Ψ–Μ. –£ ―è―΅–Β–Ι–Κ–Β –Ϋ–Α –Ω–Β―Ä–Β―¹–Β―΅–Β–Ϋ–Η–Η ―¹―²―Ä–Ψ–Κ–Η –Η ―¹―²–Ψ–Μ–±―Ü–Α –Ζ–Α–Ω–Η―¹―΄–≤–Α–Β―²―¹―è ―Ä–Β–Ζ―É–Μ―¨―²–Α―²–Ϋ–Ψ–Β ―¹–Ψ―¹―²–Ψ―è–Ϋ–Η–Β, –≤ –Κ–Ψ―²–Ψ―Ä–Ψ–Β –¥–Ψ–Μ–Ε–Β–Ϋ –Ω–Β―Ä–Β–Ι―²–Η –Α–≤―²–Ψ–Φ–Α―², –Β―¹–Μ–Η –≤ –¥–Α–Ϋ–Ϋ–Ψ–Φ –Η―¹―Ö–Ψ–¥–Ϋ–Ψ–Φ ―¹–Ψ―¹―²–Ψ―è–Ϋ–Η–Η –Ψ–Ϋ ―¹―΅–Η―²–Α–Μ –¥–Α–Ϋ–Ϋ―΄–Ι –≤―Ö–Ψ–¥–Ϋ–Ψ–Ι ―¹–Η–Φ–≤–Ψ–Μ. –ü―Ä–Η–Φ–Β―Ä ―²–Α–±–Μ–Η―Ü―΄ –Ω–Β―Ä–Β―Ö–Ψ–¥–Ψ–≤ –¥–Μ―è –Α–≤―²–Ψ–Φ–Α―²–Α, –Ζ–Α–¥–Α–Ϋ–Ϋ–Ψ–≥–Ψ –≤ –≤–Η–¥–Β –≥―Ä–Α―³–Α –Ϋ–Α ―Ä–Η―¹―É–Ϋ–Κ–Β 1, –Ω―Ä–Η–≤–Β–¥―ë–Ϋ ―¹–Ω―Ä–Α–≤–Α.
–î–Β―²–Β―Ä–Φ–Η–Ϋ–Η―Ä–Ψ–≤–Α–Ϋ–Ϋ–Ψ―¹―²―¨
 –†–Η―¹―É–Ϋ–Ψ–Κ 1. –ü―Ä–Η–Φ–Β―Ä –≥―Ä–Α―³–Α –Ω–Β―Ä–Β―Ö–Ψ–¥–Ψ–≤ –¥–Β―²–Β―Ä–Φ–Η–Ϋ–Η―Ä–Ψ–≤–Α–Ϋ–Ϋ–Ψ–≥–Ψ –ö–ê. –†–Η―¹―É–Ϋ–Ψ–Κ 1. –ü―Ä–Η–Φ–Β―Ä –≥―Ä–Α―³–Α –Ω–Β―Ä–Β―Ö–Ψ–¥–Ψ–≤ –¥–Β―²–Β―Ä–Φ–Η–Ϋ–Η―Ä–Ψ–≤–Α–Ϋ–Ϋ–Ψ–≥–Ψ –ö–ê.
|
 –†–Η―¹―É–Ϋ–Ψ–Κ 2. –ü―Ä–Η–Φ–Β―Ä –≥―Ä–Α―³–Α –Ω–Β―Ä–Β―Ö–Ψ–¥–Ψ–≤ –Ϋ–Β–¥–Β―²–Β―Ä–Φ–Η–Ϋ–Η―Ä–Ψ–≤–Α–Ϋ–Ϋ–Ψ–≥–Ψ –ö–ê ―¹ ―¹–Α–Φ–Ψ–Ω―Ä–Ψ–Η–Ζ–≤–Ψ–Μ―¨–Ϋ―΄–Φ–Η –Ω–Β―Ä–Β―Ö–Ψ–¥–Α–Φ–Η –†–Η―¹―É–Ϋ–Ψ–Κ 2. –ü―Ä–Η–Φ–Β―Ä –≥―Ä–Α―³–Α –Ω–Β―Ä–Β―Ö–Ψ–¥–Ψ–≤ –Ϋ–Β–¥–Β―²–Β―Ä–Φ–Η–Ϋ–Η―Ä–Ψ–≤–Α–Ϋ–Ϋ–Ψ–≥–Ψ –ö–ê ―¹ ―¹–Α–Φ–Ψ–Ω―Ä–Ψ–Η–Ζ–≤–Ψ–Μ―¨–Ϋ―΄–Φ–Η –Ω–Β―Ä–Β―Ö–Ψ–¥–Α–Φ–Η
|
 –†–Η―¹―É–Ϋ–Ψ–Κ 3. –ù–Β–¥–Β―²–Β―Ä–Φ–Η–Ϋ–Η―Ä–Ψ–≤–Α–Ϋ–Ϋ―΄–Ι –ö–ê ―¹ –Ω–Β―Ä–Β―Ö–Ψ–¥–Α–Φ–Η –Η–Ζ –Ψ–¥–Ϋ–Ψ–≥–Ψ ―¹–Ψ―¹―²–Ψ―è–Ϋ–Η―è –≤ ―Ä–Α–Ζ–Ϋ―΄–Β ―¹–Ψ―¹―²–Ψ―è–Ϋ–Η―è –Ω―Ä–Η –Ψ–¥–Η–Ϋ–Α–Κ–Ψ–≤–Ψ–Φ –≤―Ö–Ψ–¥–Ϋ–Ψ–Φ –≤–Ψ–Ζ–¥–Β–Ι―¹―²–≤–Η–Η
–†–Η―¹―É–Ϋ–Ψ–Κ 3. –ù–Β–¥–Β―²–Β―Ä–Φ–Η–Ϋ–Η―Ä–Ψ–≤–Α–Ϋ–Ϋ―΄–Ι –ö–ê ―¹ –Ω–Β―Ä–Β―Ö–Ψ–¥–Α–Φ–Η –Η–Ζ –Ψ–¥–Ϋ–Ψ–≥–Ψ ―¹–Ψ―¹―²–Ψ―è–Ϋ–Η―è –≤ ―Ä–Α–Ζ–Ϋ―΄–Β ―¹–Ψ―¹―²–Ψ―è–Ϋ–Η―è –Ω―Ä–Η –Ψ–¥–Η–Ϋ–Α–Κ–Ψ–≤–Ψ–Φ –≤―Ö–Ψ–¥–Ϋ–Ψ–Φ –≤–Ψ–Ζ–¥–Β–Ι―¹―²–≤–Η–Η
–ö–Ψ–Ϋ–Β―΅–Ϋ―΄–Β –Α–≤―²–Ψ–Φ–Α―²―΄ –Ω–Ψ–¥―Ä–Α–Ζ–¥–Β–Μ―è―é―²―¹―è –Ϋ–Α –¥–Β―²–Β―Ä–Φ–Η–Ϋ–Η―Ä–Ψ–≤–Α–Ϋ–Ϋ―΄–Β –Η –Ϋ–Β–¥–Β―²–Β―Ä–Φ–Η–Ϋ–Η―Ä–Ψ–≤–Α–Ϋ–Ϋ―΄–Β.
- –î–Β―²–Β―Ä–Φ–Η–Ϋ–Η―Ä–Ψ–≤–Α–Ϋ–Ϋ―΄–Φ –Κ–Ψ–Ϋ–Β―΅–Ϋ―΄–Φ –Α–≤―²–Ψ–Φ–Α―²–Ψ–Φ (–î–ö–ê) –Ϋ–Α–Ζ―΄–≤–Α–Β―²―¹―è ―²–Α–Κ–Ψ–Ι –Α–≤―²–Ψ–Φ–Α―², –≤ –Κ–Ψ―²–Ψ―Ä–Ψ–Φ –Ϋ–Β―² –¥―É–≥ ―¹ –Φ–Β―²–Κ–Ψ–Ι ΈΒ (–Ω―Ä–Β–¥–Μ–Ψ–Ε–Β–Ϋ–Η–Β, –Ϋ–Β ―¹–Ψ–¥–Β―Ä–Ε–Α―â–Β–Β –Ϋ–Η –Ψ–¥–Ϋ–Ψ–≥–Ψ ―¹–Η–Φ–≤–Ψ–Μ–Α), –Η –Η–Ζ –Μ―é–±–Ψ–≥–Ψ ―¹–Ψ―¹―²–Ψ―è–Ϋ–Η―è –Ω–Ψ –Μ―é–±–Ψ–Φ―É ―¹–Η–Φ–≤–Ψ–Μ―É –≤–Ψ–Ζ–Φ–Ψ–Ε–Β–Ϋ –Ω–Β―Ä–Β―Ö–Ψ–¥ –Ϋ–Β –±–Ψ–Μ–Β–Β, ―΅–Β–Φ –≤ –Ψ–¥–Ϋ–Ψ ―¹–Ψ―¹―²–Ψ―è–Ϋ–Η–Β.
- –ù–Β–¥–Β―²–Β―Ä–Φ–Η–Ϋ–Η―Ä–Ψ–≤–Α–Ϋ–Ϋ―΄–Ι –Κ–Ψ–Ϋ–Β―΅–Ϋ―΄–Ι –Α–≤―²–Ψ–Φ–Α―² (–ù–ö–ê) ―è–≤–Μ―è–Β―²―¹―è –Ψ–±–Ψ–±―â–Β–Ϋ–Η–Β–Φ –¥–Β―²–Β―Ä–Φ–Η–Ϋ–Η―Ä–Ψ–≤–Α–Ϋ–Ϋ–Ψ–≥–Ψ. –ù–Β–¥–Β―²–Β―Ä–Φ–Η–Ϋ–Η―Ä–Ψ–≤–Α–Ϋ–Ϋ–Ψ―¹―²―¨ –Α–≤―²–Ψ–Φ–Α―²–Ψ–≤ –Φ–Ψ–Ε–Β―² –¥–Ψ―¹―²–Η–≥–Α―²―¨―¹―è –¥–≤―É–Φ―è ―¹–Ω–Ψ―¹–Ψ–±–Α–Φ–Η: –Μ–Η–±–Ψ –Φ–Ψ–≥―É―² ―¹―É―â–Β―¹―²–≤–Ψ–≤–Α―²―¨ –Ω–Β―Ä–Β―Ö–Ψ–¥―΄ –Η–Ζ ―¹–Ψ―¹―²–Ψ―è–Ϋ–Η―è –≤ ―¹–Ψ―¹―²–Ψ―è–Ϋ–Η–Β, –≤―΄–Ζ―΄–≤–Α–Β–Φ―΄–Β –Ω―É―¹―²–Ψ–Ι ―Ü–Β–Ω–Ψ―΅–Κ–Ψ–Ι ―¹–Η–Φ–≤–Ψ–Μ–Ψ–≤, ―²–Ψ –Β―¹―²―¨ ―¹–Α–Φ–Ψ–Ω―Ä–Ψ–Η–Ζ–≤–Ψ–Μ―¨–Ϋ―΄–Β –Ω–Β―Ä–Β―Ö–Ψ–¥―΄ –±–Β–Ζ –≤–Ϋ–Β―à–Ϋ–Η―Ö –≤–Ψ–Ζ–¥–Β–Ι―¹―²–≤–Η–Ι, –Μ–Η–±–Ψ –Η–Ζ –Ψ–¥–Ϋ–Ψ–≥–Ψ ―¹–Ψ―¹―²–Ψ―è–Ϋ–Η―è –ö–ê –Φ–Ψ–Ε–Β―² –Ω–Β―Ä–Β―Ö–Ψ–¥–Η―²―¨ –≤ ―Ä–Α–Ζ–Ϋ―΄–Β ―¹–Ψ―¹―²–Ψ―è–Ϋ–Η―è –Ω–Ψ–¥ –≤–Ψ–Ζ–¥–Β–Ι―¹―²–≤–Η–Β–Φ –Ψ–¥–Ϋ–Ψ–≥–Ψ –Η ―²–Ψ–≥–Ψ –Ε–Β ―¹–Η–Φ–≤–Ψ–Μ–Α.
–ï―¹–Μ–Η ―Ä–Α―¹―¹–Φ–Ψ―²―Ä–Β―²―¨ ―¹–Μ―É―΅–Α–Ι, –Κ–Ψ–≥–¥–Α –Α–≤―²–Ψ–Φ–Α―² ―³–Ψ―Ä–Φ–Α–Μ―¨–Ϋ–Ψ –Ζ–Α–¥–Α–Ϋ ―¹–Μ–Β–¥―É―é―â–Η–Φ –Ψ–±―Ä–Α–Ζ–Ψ–Φ:  , –≥–¥–Β βÄî –Φ–Ϋ–Ψ–Ε–Β―¹―²–≤–Ψ –Ϋ–Α―΅–Α–Μ―¨–Ϋ―΄―Ö ―¹–Ψ―¹―²–Ψ―è–Ϋ–Η–Ι –Α–≤―²–Ψ–Φ–Α―²–Α, ―²–Α–Κ–Ψ–Β, ―΅―²–Ψ
, –≥–¥–Β βÄî –Φ–Ϋ–Ψ–Ε–Β―¹―²–≤–Ψ –Ϋ–Α―΅–Α–Μ―¨–Ϋ―΄―Ö ―¹–Ψ―¹―²–Ψ―è–Ϋ–Η–Ι –Α–≤―²–Ψ–Φ–Α―²–Α, ―²–Α–Κ–Ψ–Β, ―΅―²–Ψ  , ―²–Ψ –Ω–Ψ―è–≤–Μ―è–Β―²―¹―è ―²―Ä–Β―²–Η–Ι –Ω―Ä–Η–Ζ–Ϋ–Α–Κ –Ϋ–Β–¥–Β―²–Β―Ä–Φ–Η–Ϋ–Η―Ä–Ψ–≤–Α–Ϋ–Ϋ–Ψ―¹―²–Η βÄî –Ϋ–Α–Μ–Η―΅–Η–Β –Ϋ–Β―¹–Κ–Ψ–Μ―¨–Κ–Η―Ö –Ϋ–Α―΅–Α–Μ―¨–Ϋ―΄―Ö (―¹―²–Α―Ä―²–Ψ–≤―΄―Ö) ―¹–Ψ―¹―²–Ψ―è–Ϋ–Η–Ι ―É –Α–≤―²–Ψ–Φ–Α―²–Α
, ―²–Ψ –Ω–Ψ―è–≤–Μ―è–Β―²―¹―è ―²―Ä–Β―²–Η–Ι –Ω―Ä–Η–Ζ–Ϋ–Α–Κ –Ϋ–Β–¥–Β―²–Β―Ä–Φ–Η–Ϋ–Η―Ä–Ψ–≤–Α–Ϋ–Ϋ–Ψ―¹―²–Η βÄî –Ϋ–Α–Μ–Η―΅–Η–Β –Ϋ–Β―¹–Κ–Ψ–Μ―¨–Κ–Η―Ö –Ϋ–Α―΅–Α–Μ―¨–Ϋ―΄―Ö (―¹―²–Α―Ä―²–Ψ–≤―΄―Ö) ―¹–Ψ―¹―²–Ψ―è–Ϋ–Η–Ι ―É –Α–≤―²–Ψ–Φ–Α―²–Α  .
.
–Δ–Β–Ψ―Ä–Β–Φ–Α –Ψ –¥–Β―²–Β―Ä–Φ–Η–Ϋ–Η–Ζ–Α―Ü–Η–Η[–Η―¹―²–Ψ―΅–Ϋ–Η–Κ –Ϋ–Β ―É–Κ–Α–Ζ–Α–Ϋ 1628 –¥–Ϋ–Β–Ι] ―É―²–≤–Β―Ä–Ε–¥–Α–Β―², ―΅―²–Ψ –¥–Μ―è –Μ―é–±–Ψ–≥–Ψ –Κ–Ψ–Ϋ–Β―΅–Ϋ–Ψ–≥–Ψ –Α–≤―²–Ψ–Φ–Α―²–Α –Φ–Ψ–Ε–Β―² –±―΄―²―¨ –Ω–Ψ―¹―²―Ä–Ψ–Β–Ϋ ―ç–Κ–≤–Η–≤–Α–Μ–Β–Ϋ―²–Ϋ―΄–Ι –Β–Φ―É –¥–Β―²–Β―Ä–Φ–Η–Ϋ–Η―Ä–Ψ–≤–Α–Ϋ–Ϋ―΄–Ι –Κ–Ψ–Ϋ–Β―΅–Ϋ―΄–Ι –Α–≤―²–Ψ–Φ–Α―² (–¥–≤–Α –Κ–Ψ–Ϋ–Β―΅–Ϋ―΄―Ö –Α–≤―²–Ψ–Φ–Α―²–Α –Ϋ–Α–Ζ―΄–≤–Α―é―² ―ç–Κ–≤–Η–≤–Α–Μ–Β–Ϋ―²–Ϋ―΄–Φ–Η, –Β―¹–Μ–Η –Η―Ö ―è–Ζ―΄–Κ–Η ―¹–Ψ–≤–Ω–Α–¥–Α―é―²[–Ω―Ä–Ψ―è―¹–Ϋ–Η―²―¨]). –û–¥–Ϋ–Α–Κ–Ψ –Ω–Ψ―¹–Κ–Ψ–Μ―¨–Κ―É –Κ–Ψ–Μ–Η―΅–Β―¹―²–≤–Ψ ―¹–Ψ―¹―²–Ψ―è–Ϋ–Η–Ι –≤ ―ç–Κ–≤–Η–≤–Α–Μ–Β–Ϋ―²–Ϋ–Ψ–Φ –î–ö–ê –≤ ―Ö―É–¥―à–Β–Φ ―¹–Μ―É―΅–Α–Β ―Ä–Α―¹―²―ë―² ―ç–Κ―¹–Ω–Ψ–Ϋ–Β–Ϋ―Ü–Η–Α–Μ―¨–Ϋ–Ψ ―¹ ―Ä–Ψ―¹―²–Ψ–Φ –Κ–Ψ–Μ–Η―΅–Β―¹―²–≤–Α ―¹–Ψ―¹―²–Ψ―è–Ϋ–Η–Ι –Η―¹―Ö–Ψ–¥–Ϋ–Ψ–≥–Ψ –ù–ö–ê, –Ϋ–Α –Ω―Ä–Α–Κ―²–Η–Κ–Β –Ω–Ψ–¥–Ψ–±–Ϋ–Α―è –¥–Β―²–Β―Ä–Φ–Η–Ϋ–Η–Ζ–Α―Ü–Η―è –Ϋ–Β –≤―¹–Β–≥–¥–Α –≤–Ψ–Ζ–Φ–Ψ–Ε–Ϋ–Α. –ö―Ä–Ψ–Φ–Β ―²–Ψ–≥–Ψ, –Κ–Ψ–Ϋ–Β―΅–Ϋ―΄–Β –Α–≤―²–Ψ–Φ–Α―²―΄ ―¹ –≤―΄―Ö–Ψ–¥–Ψ–Φ –≤ –Ψ–±―â–Β–Φ ―¹–Μ―É―΅–Α–Β –Ϋ–Β –Ω–Ψ–¥–¥–Α―é―²―¹―è –¥–Β―²–Β―Ä–Φ–Η–Ϋ–Η–Ζ–Α―Ü–Η–Η.
–£ ―¹–Η–Μ―É –Ω–Ψ―¹–Μ–Β–¥–Ϋ–Η―Ö –¥–≤―É―Ö –Ζ–Α–Φ–Β―΅–Α–Ϋ–Η–Ι, –Ϋ–Β―¹–Φ–Ψ―²―Ä―è –Ϋ–Α –±–ΨΧ¹–Μ―¨―à―É―é ―¹–Μ–Ψ–Ε–Ϋ–Ψ―¹―²―¨ –Ϋ–Β–¥–Β―²–Β―Ä–Φ–Η–Ϋ–Η―Ä–Ψ–≤–Α–Ϋ–Ϋ―΄―Ö –Κ–Ψ–Ϋ–Β―΅–Ϋ―΄―Ö –Α–≤―²–Ψ–Φ–Α―²–Ψ–≤, –¥–Μ―è –Ζ–Α–¥–Α―΅, ―¹–≤―è–Ζ–Α–Ϋ–Ϋ―΄―Ö ―¹ –Ψ–±―Ä–Α–±–Ψ―²–Κ–Ψ–Ι ―²–Β–Κ―¹―²–Α, –Ω―Ä–Β–Η–Φ―É―â–Β―¹―²–≤–Β–Ϋ–Ϋ–Ψ –Ω―Ä–Η–Φ–Β–Ϋ―è―é―²―¹―è –Η–Φ–Β–Ϋ–Ϋ–Ψ –ù–ö–ê[–Η―¹―²–Ψ―΅–Ϋ–Η–Κ –Ϋ–Β ―É–Κ–Α–Ζ–Α–Ϋ 1628 –¥–Ϋ–Β–Ι].
–ê–≤―²–Ψ–Φ–Α―²―΄ –Η ―Ä–Β–≥―É–Μ―è―Ä–Ϋ―΄–Β ―è–Ζ―΄–Κ–Η
–î–Μ―è –Κ–Ψ–Ϋ–Β―΅–Ϋ–Ψ–≥–Ψ –Α–≤―²–Ψ–Φ–Α―²–Α –Φ–Ψ–Ε–Ϋ–Ψ –Ψ–Ω―Ä–Β–¥–Β–Μ–Η―²―¨ ―è–Ζ―΄–Κ (–Φ–Ϋ–Ψ–Ε–Β―¹―²–≤–Ψ ―¹–Μ–Ψ–≤) –≤ –Α–Μ―³–Α–≤–Η―²–Β , –Κ–Ψ―²–Ψ―Ä―΄–Ι –Ψ–Ϋ –¥–Ψ–Ω―É―¹–Κ–Α–Β―², βÄî ―²–Α–Κ –Ϋ–Α–Ζ―΄–≤–Α―é―²―¹―è ―¹–Μ–Ψ–≤–Α, ―΅―²–Β–Ϋ–Η–Β –Κ–Ψ―²–Ψ―Ä―΄―Ö –Ω–Β―Ä–Β–≤–Ψ–¥–Η―² –Α–≤―²–Ψ–Φ–Α―² –Η–Ζ –Ϋ–Α―΅–Α–Μ―¨–Ϋ–Ψ–≥–Ψ ―¹–Ψ―¹―²–Ψ―è–Ϋ–Η―è –≤ –Ψ–¥–Ϋ–Ψ –Η–Ζ –Ζ–Α–Κ–Μ―é―΅–Η―²–Β–Μ―¨–Ϋ―΄―Ö ―¹–Ψ―¹―²–Ψ―è–Ϋ–Η–Ι.
–Δ–Β–Ψ―Ä–Β–Φ–Α –ö–Μ–Η–Ϋ–Η ―É―²–≤–Β―Ä–Ε–¥–Α–Β―², ―΅―²–Ψ ―è–Ζ―΄–Κ ―è–≤–Μ―è–Β―²―¹―è ―Ä–Β–≥―É–Μ―è―Ä–Ϋ―΄–Φ ―²–Ψ–≥–¥–Α –Η ―²–Ψ–Μ―¨–Κ–Ψ ―²–Ψ–≥–¥–Α, –Κ–Ψ–≥–¥–Α –Ψ–Ϋ –¥–Ψ–Ω―É―¹–Κ–Α–Β―²―¹―è –Ϋ–Β–Κ–Ψ―²–Ψ―Ä―΄–Φ –Κ–Ψ–Ϋ–Β―΅–Ϋ―΄–Φ –Α–≤―²–Ψ–Φ–Α―²–Ψ–Φ, –Η―¹–Ω–Ψ–Μ―¨–Ζ―É–Β–Φ―΄–Φ –≤ ―ç―²–Ψ–Φ ―è–Ζ―΄–Κ–Β.
–€–Η–Ϋ–Η–Φ–Η–Ζ–Α―Ü–Η―è –Α–≤―²–Ψ–Φ–Α―²–Ψ–≤
–î–Μ―è –Μ―é–±–Ψ–≥–Ψ ―Ä–Β–≥―É–Μ―è―Ä–Ϋ–Ψ–≥–Ψ ―è–Ζ―΄–Κ–Α ―¹―É―â–Β―¹―²–≤―É–Β―² –Β–¥–Η–Ϋ―¹―²–≤–Β–Ϋ–Ϋ―΄–Ι ―¹ ―²–Ψ―΅–Ϋ–Ψ―¹―²―¨―é –¥–Ψ –Η–Ζ–Ψ–Φ–Ψ―Ä―³–Η–Ζ–Φ–Α –Α–≤―²–Ψ–Φ–Α―², –Ω―Ä–Η–Ϋ–Η–Φ–Α―é―â–Η–Ι ―ç―²–Ψ―² ―è–Ζ―΄–Κ –Η –Ψ–±–Μ–Α–¥–Α―é―â–Η–Ι –Ω―Ä–Η ―ç―²–Ψ–Φ –Ϋ–Α–Η–Φ–Β–Ϋ―¨―à–Η–Φ –≤–Ψ–Ζ–Φ–Ψ–Ε–Ϋ―΄–Φ ―΅–Η―¹–Μ–Ψ–Φ ―¹–Ψ―¹―²–Ψ―è–Ϋ–Η–Ι. –€–Η–Ϋ–Η–Φ–Α–Μ―¨–Ϋ―΄–Ι –Α–≤―²–Ψ–Φ–Α―² –¥–Μ―è ―è–Ζ―΄–Κ–Α, –Ζ–Α–¥–Α–Ϋ–Ϋ–Ψ–≥–Ψ –¥–Β―²–Β―Ä–Φ–Η–Ϋ–Η―Ä–Ψ–≤–Α–Ϋ–Ϋ―΄–Φ –Κ–Ψ–Ϋ–Β―΅–Ϋ―΄–Φ –Α–≤―²–Ψ–Φ–Α―²–Ψ–Φ, –Φ–Ψ–Ε–Β―² –±―΄―²―¨ –Ψ―¹―É―â–Β―¹―²–≤–Μ―ë–Ϋ –Ζ–Α –Ω–Ψ–Μ–Η–Ϋ–Ψ–Φ–Η–Α–Μ―¨–Ϋ–Ψ–Β –≤―Ä–Β–Φ―è, ―΅―²–Ψ –Ω–Ψ–Ζ–≤–Ψ–Μ―è–Β―² –Ψ–Ω―²–Η–Φ–Η–Ζ–Η―Ä–Ψ–≤–Α―²―¨ ―Ä–Α―¹―Ö–Ψ–¥ –Ω–Α–Φ―è―²–Η, ―²―Ä–Β–±―É–Β–Φ―΄–Ι –¥–Μ―è ―Ä–Α–±–Ψ―²―΄ ―¹ –Α–≤―²–Ψ–Φ–Α―²–Ψ–Φ, –Α ―²–Α–Κ–Ε–Β ―Ä–Β―à–Α―²―¨ ―²–Α–Κ–Η–Β –Ζ–Α–¥–Α―΅–Η, –Κ–Α–Κ –Ω―Ä–Ψ–≤–Β―Ä–Κ–Α ―ç–Κ–≤–Η–≤–Α–Μ–Β–Ϋ―²–Ϋ–Ψ―¹―²–Η –¥–≤―É―Ö –Α–≤―²–Ψ–Φ–Α―²–Ψ–≤ –Ζ–Α –Ω–Ψ–Μ–Η–Ϋ–Ψ–Φ–Η–Α–Μ―¨–Ϋ–Ψ–Β –≤―Ä–Β–Φ―è.
–Γ–Ω–Β―Ü–Η–Α–Μ–Η–Ζ–Η―Ä–Ψ–≤–Α–Ϋ–Ϋ―΄–Β ―è–Ζ―΄–Κ–Η –Ω―Ä–Ψ–≥―Ä–Α–Φ–Φ–Η―Ä–Ψ–≤–Α–Ϋ–Η―è
–£ –≥―Ä–Α―³–Η―΅–Β―¹–Κ–Ψ–Φ ―è–Ζ―΄–Κ–Β SFC –Ω―Ä–Ψ–≥―Ä–Α–Φ–Φ–Α –Ψ–Ω–Η―¹―΄–≤–Α–Β―²―¹―è –≤ –≤–Η–¥–Β ―¹―Ö–Β–Φ–Α―²–Η―΅–Β―¹–Κ–Ψ–Ι –Ω–Ψ―¹–Μ–Β–¥–Ψ–≤–Α―²–Β–Μ―¨–Ϋ–Ψ―¹―²–Η ―à–Α–≥–Ψ–≤, –Ψ–±―ä–Β–¥–Η–Ϋ―ë–Ϋ–Ϋ―΄―Ö –Ω–Β―Ä–Β―Ö–Ψ–¥–Α–Φ–Η.
–†–Α–Ζ―Ä–Α–±–Ψ―²–Κ–Α –Φ–Ψ–¥–Β–Μ–Β–Ι ―¹ –Η―¹–Ω–Ψ–Μ―¨–Ζ–Ψ–≤–Α–Ϋ–Η–Β–Φ –Κ–Ψ–Ϋ–Β―΅–Ϋ―΄―Ö –Α–≤―²–Ψ–Φ–Α―²–Ψ–≤
–ö–Ψ–Ϋ–Β―΅–Ϋ―΄–Β –Α–≤―²–Ψ–Φ–Α―²―΄ –Ω–Ψ–Ζ–≤–Ψ–Μ―è―é―² ―¹―²―Ä–Ψ–Η―²―¨ –Φ–Ψ–¥–Β–Μ–Η ―¹–Η―¹―²–Β–Φ –Ω–Α―Ä–Α–Μ–Μ–Β–Μ―¨–Ϋ–Ψ–Ι –Ψ–±―Ä–Α–±–Ψ―²–Κ–Η, –Ψ–¥–Ϋ–Α–Κ–Ψ, ―΅―²–Ψ–±―΄ –Η–Ζ–Φ–Β–Ϋ–Η―²―¨ ―΅–Η―¹–Μ–Ψ –Ω–Α―Ä–Α–Μ–Μ–Β–Μ―¨–Ϋ―΄―Ö –Ω―Ä–Ψ―Ü–Β―¹―¹–Ψ–≤ –≤ ―²–Α–Κ–Ψ–Ι –Φ–Ψ–¥–Β–Μ–Η, –Ω–Ψ―²―Ä–Β–±―É–Β―²―¹―è –≤–Ϋ–Β―¹―²–Η ―¹―É―â–Β―¹―²–≤–Β–Ϋ–Ϋ―΄–Β –Η–Ζ–Φ–Β–Ϋ–Β–Ϋ–Η―è –≤ ―¹–Α–Φ―É –Φ–Ψ–¥–Β–Μ―¨. –ö―Ä–Ψ–Φ–Β ―²–Ψ–≥–Ψ, –Ω–Ψ–Ω―΄―²–Κ–Α ―Ä–Α–Ζ―Ä–Α–±–Ψ―²–Κ–Η ―¹–Μ–Ψ–Ε–Ϋ–Ψ–Ι –Φ–Ψ–¥–Β–Μ–Η, ―Ä–Β–Α–Μ–Η–Ζ–Ψ–≤–Α–Ϋ–Ϋ–Ψ–Ι –Κ–Ψ–Ϋ–Β―΅–Ϋ―΄–Φ –¥–Β―²–Β―Ä–Φ–Η–Ϋ–Η―Ä–Ψ–≤–Α–Ϋ–Ϋ―΄–Φ –Α–≤―²–Ψ–Φ–Α―²–Ψ–Φ, –Ω―Ä–Η–≤–Ψ–¥–Η―² –Κ –±―΄―¹―²―Ä–Ψ–Φ―É ―Ä–Ψ―¹―²―É ―΅–Η―¹–Μ–Α ―¹–Ψ―¹―²–Ψ―è–Ϋ–Η–Ι –Α–≤―²–Ψ–Φ–Α―²–Α, ―΅―²–Ψ –≤ –Η―²–Ψ–≥–Β –¥–Β–Μ–Α–Β―² ―Ä–Α–Ζ―Ä–Α–±–Ψ―²–Κ―É ―²–Α–Κ–Ψ–Ι –Φ–Ψ–¥–Β–Μ–Η –Κ―Ä–Α–Ι–Ϋ–Β ―²―Ä―É–¥–Ψ―ë–Φ–Κ–Ψ–Ι. –ö–Α–Κ –±―΄–Μ–Ψ –Ψ―²–Φ–Β―΅–Β–Ϋ–Ψ –≤―΄―à–Β, –Ω–Ψ―¹–Μ–Β–¥–Ϋ―é―é –Ω―Ä–Ψ–±–Μ–Β–Φ―É –Φ–Ψ–Ε–Ϋ–Ψ ―Ä–Β―à–Η―²―¨, –Β―¹–Μ–Η –Η―¹–Ω–Ψ–Μ―¨–Ζ–Ψ–≤–Α―²―¨ –Ϋ–Β–¥–Β―²–Β―Ä–Φ–Η–Ϋ–Η―Ä–Ψ–≤–Α–Ϋ–Ϋ―΄–Ι –Α–≤―²–Ψ–Φ–Α―².
–ß―²–Ψ –Φ–Ψ–Ε–Β―² ¬Ϊ–¥–Β–Μ–Α―²―¨¬Μ –Κ–Ψ–Ϋ–Β―΅–Ϋ―΄–Ι –Α–≤―²–Ψ–Φ–Α―² –Η –Ω–Ψ―¹–Μ–Β–¥–Ψ–≤–Α―²–Β–Μ―¨–Ϋ–Ψ―¹―²–Ϋ–Α―è –Φ–Α―à–Η–Ϋ–Α?
–û―²–≤–Β―² –¥–Α―ë―²―¹―è –≤ ―Ä–Α–Ζ–Μ–Η―΅–Ϋ―΄―Ö ―²–Β―Ä–Φ–Η–Ϋ–Α―Ö –≤ –Ζ–Α–≤–Η―¹–Η–Φ–Ψ―¹―²–Η –Ψ―² ―²–Ψ–≥–Ψ, ―è–≤–Μ―è–Β―²―¹―è –Μ–Η –Α–≤―²–Ψ–Φ–Α―² (―¹–Ψ–Ψ―²–≤–Β―²―¹―²–≤–Β–Ϋ–Ϋ–Ψ –ü-–Φ–Α―à–Η–Ϋ–Α) –Α–≤―²–Ψ–Ϋ–Ψ–Φ–Ϋ―΄–Φ –Η–Μ–Η –Ϋ–Β―²[2]. –ê–≤―²–Ψ–Ϋ–Ψ–Φ–Ϋ―΄–Ι –Κ–Ψ–Ϋ–Β―΅–Ϋ―΄–Ι –Α–≤―²–Ψ–Φ–Α―², –Ϋ–Α―΅–Η–Ϋ–Α―è ―¹ –Ϋ–Β–Κ–Ψ―²–Ψ―Ä–Ψ–≥–Ψ ―²–Α–Κ―²–Α, –Φ–Ψ–Ε–Β―² –Μ–Η―à―¨ –≥–Β–Ϋ–Β―Ä–Η―Ä–Ψ–≤–Α―²―¨ –Ω–Β―Ä–Η–Ψ–¥–Η―΅–Β―¹–Κ―É―é –Ω–Ψ―¹–Μ–Β–¥–Ψ–≤–Α―²–Β–Μ―¨–Ϋ–Ψ―¹―²―¨ ―¹–Ψ―¹―²–Ψ―è–Ϋ–Η–Ι ―Ö (―¹–Ψ–Ψ―²–≤–Β―²―¹―²–≤–Β–Ϋ–Ϋ–Ψ –ü-–Φ–Α―à–Η–Ϋ–Α βÄî –Ω–Ψ―¹–Μ–Β–¥–Ψ–≤–Α―²–Β–Μ―¨–Ϋ–Ψ―¹―²―¨ –≤―΄―Ö–Ψ–¥–Ϋ―΄―Ö ―¹–Η–Φ–≤–Ψ–Μ–Ψ–≤ y). –ï―¹–Μ–Η ―ç―²–Α –Ω–Ψ―¹–Μ–Β–¥–Ψ–≤–Α―²–Β–Μ―¨–Ϋ–Ψ―¹―²―¨ ―¹–Ψ―¹―²–Ψ–Η―² –Μ–Η―à―¨ –Η–Ζ –Ψ–¥–Ϋ–Ψ–≥–Ψ ―¹–Η–Φ–≤–Ψ–Μ–Α, ―²–Ψ ―ç―²–Ψ –Ψ–Ζ–Ϋ–Α―΅–Α–Β―², ―΅―²–Ψ –Ζ–Α –Κ–Ψ–Ϋ–Β―΅–Ϋ–Ψ–Β ―΅–Η―¹–Μ–Ψ ―²–Α–Κ―²–Ψ–≤ –Α–≤―²–Ψ–Φ–Α―² –¥–Ψ―¹―²–Η–≥–Α–Β―² ―Ä–Α–≤–Ϋ–Ψ–≤–Β―¹–Ϋ–Ψ–≥–Ψ ―¹–Ψ―¹―²–Ψ―è–Ϋ–Η―è. –ï―¹–Μ–Η –Ε–Β ―ç―²–Α –Ω–Ψ―¹–Μ–Β–¥–Ψ–≤–Α―²–Β–Μ―¨–Ϋ–Ψ―¹―²―¨ ―¹–Ψ–¥–Β―Ä–Ε–Η―² –Ϋ–Β―¹–Κ–Ψ–Μ―¨–Κ–Ψ ―¹–Η–Φ–≤–Ψ–Μ–Ψ–≤, ―ç―²–Ψ –Ψ–Ζ–Ϋ–Α―΅–Α–Β―², ―΅―²–Ψ –Α–≤―²–Ψ–Φ–Α―² –Ω–Ψ―¹–Μ–Β–¥–Ψ–≤–Α―²–Β–Μ―¨–Ϋ–Ψ –Ω―Ä–Ψ―Ö–Ψ–¥–Η―² ―¹–Ψ―¹―²–Ψ―è–Ϋ–Η―è, ―¹–Ψ–Ψ―²–≤–Β―²―¹―²–≤―É―é―â–Η–Β ―ç―²–Η–Φ ―¹–Η–Φ–≤–Ψ–Μ–Α–Φ, –Α –Ζ–Α―²–Β–Φ ―Ä–Α–±–Ψ―²–Α –Α–≤―²–Ψ–Φ–Α―²–Α –Ϋ–Β–Ψ–≥―Ä–Α–Ϋ–Η―΅–Β–Ϋ–Ϋ–Ψ –¥–Ψ–Μ–≥–Ψ –Ω–Β―Ä–Η–Ψ–¥–Η―΅–Β―¹–Κ–Η –Ω–Ψ–≤―²–Ψ―Ä―è–Β―²―¹―è. –ë–Ψ–Μ–Β–Β ―²–Ψ–≥–Ψ, –Κ–Α–Κ–Ψ–≤–Α –±―΄ –Ϋ–Η –±―΄–Μ–Α –Ω–Β―Ä–Η–Ψ–¥–Η―΅–Β―¹–Κ–Α―è –Ω–Ψ―¹–Μ–Β–¥–Ψ–≤–Α―²–Β–Μ―¨–Ϋ–Ψ―¹―²―¨ ―¹–Ψ―¹―²–Ψ―è–Ϋ–Η–Ι –Κ–Ψ–Ϋ–Β―΅–Ϋ–Ψ–Ι –¥–Μ–Η–Ϋ―΄, –≤―¹–Β–≥–¥–Α –Φ–Ψ–Ε–Β―² –±―΄―²―¨ –Ω–Ψ―¹―²―Ä–Ψ–Β–Ϋ –Α–≤―²–Ψ–Ϋ–Ψ–Φ–Ϋ―΄–Ι –Κ–Ψ–Ϋ–Β―΅–Ϋ―΄–Ι –Α–≤―²–Ψ–Φ–Α―², –Κ–Ψ―²–Ψ―Ä―΄–Ι, –Ϋ–Α―΅–Η–Ϋ–Α―è ―É–Ε–Β ―¹–Ψ –≤―²–Ψ―Ä–Ψ–≥–Ψ ―²–Α–Κ―²–Α, –≥–Β–Ϋ–Β―Ä–Η―Ä―É–Β―² ―ç―²―É –Ω–Ψ―¹–Μ–Β–¥–Ψ–≤–Α―²–Β–Μ―¨–Ϋ–Ψ―¹―²―¨. –ù–Η―΅–Β–≥–Ψ –Η–Ϋ–Ψ–≥–Ψ, –Κ―Ä–Ψ–Φ–Β –Ω–Β―Ä–Η–Ψ–¥–Η―΅–Β―¹–Κ–Ψ–≥–Ψ –Ω–Ψ–≤―²–Ψ―Ä–Β–Ϋ–Η―è –Ψ–¥–Ϋ–Ψ–≥–Ψ –Η ―²–Ψ–≥–Ψ –Ε–Β ―¹–Ψ―¹―²–Ψ―è–Ϋ–Η―è –Η–Μ–Η –Κ–Ψ–Ϋ–Β―΅–Ϋ–Ψ–Ι –Ω–Ψ―¹–Μ–Β–¥–Ψ–≤–Α―²–Β–Μ―¨–Ϋ–Ψ―¹―²–Η ―¹–Ψ―¹―²–Ψ―è–Ϋ–Η–Ι, –Α–≤―²–Ψ–Ϋ–Ψ–Φ–Ϋ―΄–Ι –Α–≤―²–Ψ–Φ–Α―² ¬Ϊ–¥–Β–Μ–Α―²―¨¬Μ –Ϋ–Β –Φ–Ψ–Ε–Β―². –û–¥–Ϋ–Α–Κ–Ψ –≤ ―¹–≤―è–Ζ–Η ―¹ ―²–Β–Φ, ―΅―²–Ψ –Ω–Ψ―¹–Μ–Β–¥–Ψ–≤–Α―²–Β–Μ―¨–Ϋ–Ψ–Β –≤―΄–Ω–Ψ–Μ–Ϋ–Β–Ϋ–Η–Β –Ζ–Α–¥–Α–Ϋ–Ϋ–Ψ–≥–Ψ ―Ü–Η–Κ–Μ–Α –Ψ–Ω–Β―Ä–Α―Ü–Η–Ι ―²–Η–Ω–Η―΅–Ϋ–Ψ –¥–Μ―è –Φ–Ϋ–Ψ–≥–Η―Ö –Ψ–±–Μ–Α―¹―²–Β–Ι ―¹–Ψ–≤―Ä–Β–Φ–Β–Ϋ–Ϋ–Ψ–Ι ―²–Β―Ö–Ϋ–Η–Κ–Η, –¥–Η–Ϋ–Α–Φ–Η―΅–Β―¹–Κ–Η–Β ―¹–Η―¹―²–Β–Φ―΄, –Κ–Ψ―²–Ψ―Ä―΄–Β –≤ –Ω―Ä–Η–Β–Φ–Μ–Β–Φ–Ψ–Ι –Η–¥–Β–Α–Μ–Η–Ζ–Α―Ü–Η–Η –Φ–Ψ–Ε–Ϋ–Ψ ―Ä–Α―¹―¹–Φ–Α―²―Ä–Η–≤–Α―²―¨ –Κ–Α–Κ –Α–≤―²–Ψ–Ϋ–Ψ–Φ–Ϋ―΄–Ι –Α–≤―²–Ψ–Φ–Α―², –Η–Φ–Β―é―² ―à–Η―Ä–Ψ–Κ–Ψ–Β –Ω―Ä–Η–Φ–Β–Ϋ–Β–Ϋ–Η–Β.
–ö–Μ–Α―¹―¹–Η―΅–Β―¹–Κ–Η–Φ –Ω―Ä–Η–Φ–Β―Ä–Ψ–Φ –Φ–Ψ–≥―É―² ―¹–Μ―É–Ε–Η―²―¨ –Α–≤―²–Ψ–Φ–Α―²―΄-–Κ―É–Κ–Μ―΄, –≤―΄–Ω–Ψ–Μ–Ϋ―è–≤―à–Η–Β ―¹–Μ–Ψ–Ε–Ϋ―΄–Β –Ω–Ψ―¹–Μ–Β–¥–Ψ–≤–Α―²–Β–Μ―¨–Ϋ–Ψ―¹―²–Η –¥–Β–Ι―¹―²–≤–Η–Ι, –Ϋ–Α–Ω―Ä–Η–Φ–Β―Ä: –Ω–Η―à―É―â–Η–Β –Ϋ–Α –±―É–Φ–Α–≥–Β –Ψ–Ω―Ä–Β–¥–Β–Μ―ë–Ϋ–Ϋ―΄–Ι ―²–Β–Κ―¹―², –Η–≥―Ä–Α―é―â–Η–Β –Ϋ–Α ―Ä–Ψ―è–Μ–Β –Ζ–Α―Ä–Α–Ϋ–Β–Β ―É―¹―²–Α–Ϋ–Ψ–≤–Μ–Β–Ϋ–Ϋ―΄–Β –Ω―¨–Β―¹―΄ ―². –¥.
–Γ–Ψ–≤―Ä–Β–Φ–Β–Ϋ–Ϋ―΄–Φ –Ω―Ä–Η–Φ–Β―Ä–Ψ–Φ ―¹–Μ―É–Ε–Α―² –Φ–Ϋ–Ψ–≥–Η–Β ―¹―²–Α–Ϋ–Κ–Η-–Α–≤―²–Ψ–Φ–Α―²―΄, –Α–≤―²–Ψ–Φ–Α―²–Η―΅–Β―¹–Κ–Η–Β –Μ–Η–Ϋ–Η–Η –Η ―¹–Η―¹―²–Β–Φ―΄ –Α–≤―²–Ψ–Φ–Α―²–Η―΅–Β―¹–Κ–Ψ–≥–Ψ ―É–Ω―Ä–Α–≤–Μ–Β–Ϋ–Η―è ―Ü–Η–Κ–Μ–Η―΅–Β―¹–Κ–Η–Φ–Η –Ω―Ä–Ψ–Η–Ζ–≤–Ψ–¥―¹―²–≤–Α–Φ–Η. –ï―¹–Μ–Η –Α–≤―²–Ψ–Φ–Α―² –Ϋ–Β –Α–≤―²–Ψ–Ϋ–Ψ–Φ–Β–Ϋ, ―²–Ψ –Β―¹―²―¨ ―¹–Ψ―¹―²–Ψ―è–Ϋ–Η–Β –≤―Ö–Ψ–¥–Α –Η–Ζ–Φ–Β–Ϋ―è–Β―²―¹―è –Ψ―² ―²–Α–Κ―²–Α –Κ ―²–Α–Κ―²―É, ―²–Ψ –Ψ―²–≤–Β―² –Ϋ–Α –≤–Ψ–Ω―Ä–Ψ―¹, ―΅―²–Ψ –Φ–Ψ–Ε–Β―² ¬Ϊ–¥–Β–Μ–Α―²―¨¬Μ –Η ―΅―²–Ψ –Ϋ–Β –Φ–Ψ–Ε–Β―² ¬Ϊ–¥–Β–Μ–Α―²―¨¬Μ –Κ–Ψ–Ϋ–Β―΅–Ϋ―΄–Ι –Α–≤―²–Ψ–Φ–Α―², –Φ–Ψ–Ε–Ϋ–Ψ –¥–Α―²―¨ –≤ ―Ä–Α–Ζ–Ϋ―΄―Ö ―²–Β―Ä–Φ–Η–Ϋ–Α―Ö. –ù–Α–Ω―Ä–Η–Φ–Β―Ä, –Ψ―²–≤–Β―² –Φ–Ψ–Ε–Ϋ–Ψ ―¹―³–Ψ―Ä–Φ―É–Μ–Η―Ä–Ψ–≤–Α―²―¨ –Ϋ–Α ―è–Ζ―΄–Κ–Β –Ω―Ä–Β–¥―¹―²–Α–≤–Μ–Β–Ϋ–Η―è ―¹–Ψ–±―΄―²–Η–Ι. –î–Β–Ι―¹―²–≤–Η―²–Β–Μ―¨–Ϋ–Ψ, –Ϋ–Β–Α–≤―²–Ψ–Ϋ–Ψ–Φ–Ϋ―΄–Ι –Κ–Ψ–Ϋ–Β―΅–Ϋ―΄–Ι –Α–≤―²–Ψ–Φ–Α―² –Η–Μ–Η –Ω–Ψ―¹–Μ–Β–¥–Ψ–≤–Α―²–Β–Μ―¨–Ϋ–Ψ―¹―²–Ϋ–Α―è –Φ–Α―à–Η–Ϋ–Α –Μ–Η―à―¨ –Ω―Ä–Β–Ψ–±―Ä–Α–Ζ―É―é―² –≤―Ö–Ψ–¥–Ϋ―΄–Β –Ω–Ψ―¹–Μ–Β–¥–Ψ–≤–Α―²–Β–Μ―¨–Ϋ–Ψ―¹―²–Η ―¹–Η–Φ–≤–Ψ–Μ–Ψ–≤ –≤ –Ω–Ψ―¹–Μ–Β–¥–Ψ–≤–Α―²–Β–Μ―¨–Ϋ–Ψ―¹―²–Η ―¹–Ψ―¹―²–Ψ―è–Ϋ–Η–Ι –Η–Μ–Η –≤―΄―Ö–Ψ–¥–Ϋ―΄―Ö ―¹–Η–Φ–≤–Ψ–Μ–Ψ–≤, –Η ―¹–Κ–Α–Ζ–Α―²―¨, ―΅―²–Ψ –Φ–Ψ–Ε–Β―² –Η ―΅―²–Ψ –Ϋ–Β –Φ–Ψ–Ε–Β―² ¬Ϊ–¥–Β–Μ–Α―²―¨¬Μ –Κ–Ψ–Ϋ–Β―΅–Ϋ―΄–Ι –Α–≤―²–Ψ–Φ–Α―², –Ζ–Ϋ–Α―΅–Η―² –≤―΄―è―¹–Ϋ–Η―²―¨, –Κ–Α–Κ–Η–Β –Ω―Ä–Β–Ψ–±―Ä–Α–Ζ–Ψ–≤–Α–Ϋ–Η―è –Ω–Ψ―¹–Μ–Β–¥–Ψ–≤–Α―²–Β–Μ―¨–Ϋ–Ψ―¹―²–Β–Ι –≤–Ψ–Ζ–Φ–Ψ–Ε–Ϋ―΄ –≤ –Κ–Ψ–Ϋ–Β―΅–Ϋ–Ψ–Φ –Α–≤―²–Ψ–Φ–Α―²–Β, –Α –Κ–Α–Κ–Η–Β –Ϋ–Β–≤–Ψ–Ζ–Φ–Ψ–Ε–Ϋ―΄. –ù–Ψ ―²–Α–Κ –Κ–Α–Κ –Κ–Ψ–Μ–Η―΅–Β―¹―²–≤–Ψ ―¹–Ψ―¹―²–Ψ―è–Ϋ–Η–Ι (―¹–Ψ–Ψ―²–≤–Β―²―¹―²–≤–Β–Ϋ–Ϋ–Ψ –≤―΄―Ö–Ψ–¥–Ϋ―΄―Ö ―¹–Η–Φ–≤–Ψ–Μ–Ψ–≤) –Κ–Ψ–Ϋ–Β―΅–Ϋ–Ψ, ―ç―²–Ψ―² –≤–Ψ–Ω―Ä–Ψ―¹ ―ç–Κ–≤–Η–≤–Α–Μ–Β–Ϋ―²–Β–Ϋ ―²–Α–Κ–Ψ–Φ―É –≤–Ψ–Ω―Ä–Ψ―¹―É: –Ω―Ä–Η –Κ–Α–Κ–Η―Ö –≤―Ö–Ψ–¥–Ϋ―΄―Ö –Ω–Ψ―¹–Μ–Β–¥–Ψ–≤–Α―²–Β–Μ―¨–Ϋ–Ψ―¹―²―è―Ö –≤–Ψ–Ζ–Ϋ–Η–Κ–Α–Β―² –Κ–Α–Ε–¥–Ψ–Β –Η–Ζ –≤–Ψ–Ζ–Φ–Ψ–Ε–Ϋ―΄―Ö ―¹–Ψ―¹―²–Ψ―è–Ϋ–Η–Ι (–Η–Μ–Η –Κ–Α–Ε–¥―΄–Ι –Η–Ζ –≤―΄―Ö–Ψ–¥–Ϋ―΄―Ö ―¹–Η–Φ–≤–Ψ–Μ–Ψ–≤). –≠―²–Ψ―² –Ω–Ψ―¹–Μ–Β–¥–Ϋ–Η–Ι –≤–Ψ–Ω―Ä–Ψ―¹ –≤ ―²–Β―Ä–Φ–Η–Ϋ–Α―Ö, –Ω―Ä–Η–Ϋ―è―²―΄―Ö –≤ ―²–Β–Ψ―Ä–Η–Η –Κ–Ψ–Ϋ–Β―΅–Ϋ―΄―Ö –Α–≤―²–Ψ–Φ–Α―²–Ψ–≤, ―³–Ψ―Ä–Φ―É–Μ–Η―Ä―É–Β―²―¹―è ―²–Α–Κ: –Κ–Α–Κ–Η–Β ―¹–Ψ–±―΄―²–Η―è –Φ–Ψ–≥―É―² –Η –Κ–Α–Κ–Η–Β –Ϋ–Β –Φ–Ψ–≥―É―² –±―΄―²―¨ –Ω―Ä–Β–¥―¹―²–Α–≤–Μ–Β–Ϋ―΄ –≤ –Κ–Ψ–Ϋ–Β―΅–Ϋ–Ψ–Φ –Α–≤―²–Ψ–Φ–Α―²–Β –Κ–Α–Ε–¥―΄–Φ –Η–Ζ –≤–Ψ–Ζ–Φ–Ψ–Ε–Ϋ―΄―Ö ―¹–Ψ―¹―²–Ψ―è–Ϋ–Η–Ι (–Η–Μ–Η –Κ–Α–Ε–¥―΄–Φ –Η–Ζ –≤―΄―Ö–Ψ–¥–Ϋ―΄―Ö ―¹–Η–Φ–≤–Ψ–Μ–Ψ–≤).
–û―²–≤–Β―² –¥–Α―ë―²―¹―è ―²–Β–Ψ―Ä–Β–Φ–Α–Φ–Η –ö–Μ–Η–Ϋ–Η. –≠―²–Ψ―² –Ψ―²–≤–Β―² ―²–Ψ―΅–Ϋ―΄–Ι, ―²–Α–Κ –Κ–Α–Κ ―²–Β–Ψ―Ä–Β–Φ―΄ –ö–Μ–Η–Ϋ–Η ―É―¹―²–Α–Ϋ–Α–≤–Μ–Η–≤–Α―é―² –Ϋ–Β–Ψ–±―Ö–Ψ–¥–Η–Φ―΄–Β –Η –¥–Ψ―¹―²–Α―²–Ψ―΅–Ϋ―΄–Β ―É―¹–Μ–Ψ–≤–Η―è –Ω―Ä–Β–¥―¹―²–Α–≤–Η–Φ–Ψ―¹―²–Η –Ω–Ψ―¹–Μ–Β–¥–Ψ–≤–Α―²–Β–Μ―¨–Ϋ–Ψ―¹―²–Η ―¹–Ψ–±―΄―²–Η–Ι –≤ –Α–≤―²–Ψ–Φ–Α―²–Β, –Α –Η–Φ–Β–Ϋ–Ϋ–Ψ: –≤―΄–¥–Β–Μ―è―é―²―¹―è –Ψ―¹–Ψ–±―΄–Β –Φ–Ϋ–Ψ–Ε–Β―¹―²–≤–Α –Ω–Ψ―¹–Μ–Β–¥–Ψ–≤–Α―²–Β–Μ―¨–Ϋ–Ψ―¹―²–Β–Ι –≤―Ö–Ψ–¥–Ϋ―΄―Ö ―¹–Η–Φ–≤–Ψ–Μ–Ψ–≤ βÄî ―Ä–Β–≥―É–Μ―è―Ä–Ϋ―΄–Β –Φ–Ϋ–Ψ–Ε–Β―¹―²–≤–Α. –Λ–Α–Κ―² –Ω–Ψ―è–≤–Μ–Β–Ϋ–Η―è –≤―Ö–Ψ–¥–Ϋ–Ψ–Ι –Ω–Ψ―¹–Μ–Β–¥–Ψ–≤–Α―²–Β–Μ―¨–Ϋ–Ψ―¹―²–Η –Η–Ζ ―²–Α–Κ–Ψ–≥–Ψ –Φ–Ϋ–Ψ–Ε–Β―¹―²–≤–Α –Ϋ–Α–Ζ―΄–≤–Α–Β―²―¹―è ―¹–Ψ–Ψ―²–≤–Β―²―¹―²–≤―É―é―â–Η–Φ ―Ä–Β–≥―É–Μ―è―Ä–Ϋ―΄–Φ ―¹–Ψ–±―΄―²–Η–Β–Φ. –Δ–Β–Ψ―Ä–Β–Φ―΄ –ö–Μ–Η–Ϋ–Η ―É―¹―²–Α–Ϋ–Α–≤–Μ–Η–≤–Α―é―², ―΅―²–Ψ –≤ –Κ–Ψ–Ϋ–Β―΅–Ϋ–Ψ–Φ –Α–≤―²–Ψ–Φ–Α―²–Β –Φ–Ψ–≥―É―² –±―΄―²―¨ –Ω―Ä–Β–¥―¹―²–Α–≤–Μ–Β–Ϋ―΄ ―Ä–Β–≥―É–Μ―è―Ä–Ϋ―΄–Β ―¹–Ψ–±―΄―²–Η―è –Η ―²–Ψ–Μ―¨–Κ–Ψ –Ψ–Ϋ–Η. –Δ–Α–Κ–Η–Φ –Ψ–±―Ä–Α–Ζ–Ψ–Φ, –Ϋ–Α ―è–Ζ―΄–Κ–Β –Ω―Ä–Β–¥―¹―²–Α–≤–Μ–Β–Ϋ–Η―è ―¹–Ψ–±―΄―²–Η–Ι –Ψ―²–≤–Β―² –Ϋ–Α –≤–Ψ–Ω―Ä–Ψ―¹, ―΅―²–Ψ –Φ–Ψ–Ε–Β―² ¬Ϊ–¥–Β–Μ–Α―²―¨¬Μ –Κ–Ψ–Ϋ–Β―΅–Ϋ―΄–Ι –Α–≤―²–Ψ–Φ–Α―², –¥–Α―ë―²―¹―è –Ψ–¥–Ϋ–Ψ–Ζ–Ϋ–Α―΅–Ϋ–Ψ: –Κ–Ψ–Ϋ–Β―΅–Ϋ―΄–Ι –Α–≤―²–Ψ–Φ–Α―² –Φ–Ψ–Ε–Β―² –Ω―Ä–Β–¥―¹―²–Α–≤–Μ―è―²―¨ ―²–Ψ–Μ―¨–Κ–Ψ ―Ä–Β–≥―É–Μ―è―Ä–Ϋ―΄–Β ―¹–Ψ–±―΄―²–Η―è. –†―è–¥ –≤–Α–Ε–Ϋ―΄―Ö –Φ–Ϋ–Ψ–Ε–Β―¹―²–≤ –≤―Ö–Ψ–¥–Ϋ―΄―Ö –Ω–Ψ―¹–Μ–Β–¥–Ψ–≤–Α―²–Β–Μ―¨–Ϋ–Ψ―¹―²–Β–Ι, ―¹ –Κ–Ψ―²–Ψ―Ä―΄–Φ–Η ―΅–Α―¹―²–Ψ –Ω―Ä–Η―Ö–Ψ–¥–Η―²―¹―è –Η–Φ–Β―²―¨ –¥–Β–Μ–Ψ –Ϋ–Α –Ω―Ä–Α–Κ―²–Η–Κ–Β, –Ζ–Α–≤–Β–¥–Ψ–Φ–Ψ ―Ä–Β–≥―É–Μ―è―Ä–Ϋ―΄. –Δ–Α–Κ, –Ϋ–Α–Ω―Ä–Η–Φ–Β―Ä, –Ζ–Α–≤–Β–¥–Ψ–Φ–Ψ ―Ä–Β–≥―É–Μ―è―Ä–Ϋ–Ψ –Φ–Ϋ–Ψ–Ε–Β―¹―²–≤–Ψ, ―¹–Ψ―¹―²–Ψ―è―â–Β–Β –Η–Ζ –Μ―é–±–Ψ–≥–Ψ –Κ–Ψ–Ϋ–Β―΅–Ϋ–Ψ–≥–Ψ ―΅–Η―¹–Μ–Α –≤―Ö–Ψ–¥–Ϋ―΄―Ö –Ω–Ψ―¹–Μ–Β–¥–Ψ–≤–Α―²–Β–Μ―¨–Ϋ–Ψ―¹―²–Β–Ι –Κ–Ψ–Ϋ–Β―΅–Ϋ–Ψ–Ι –¥–Μ–Η–Ϋ―΄; –Φ–Ϋ–Ψ–Ε–Β―¹―²–≤–Ψ –Μ―é–±―΄―Ö –Ω–Β―Ä–Η–Ψ–¥–Η―΅–Β―¹–Κ–Η―Ö –≤―Ö–Ψ–¥–Ϋ―΄―Ö –Ω–Ψ―¹–Μ–Β–¥–Ψ–≤–Α―²–Β–Μ―¨–Ϋ–Ψ―¹―²–Β–Ι; –Φ–Ϋ–Ψ–Ε–Β―¹―²–≤–Ψ –±–Β―¹–Κ–Ψ–Ϋ–Β―΅–Ϋ―΄―Ö –Ω–Ψ―¹–Μ–Β–¥–Ψ–≤–Α―²–Β–Μ―¨–Ϋ–Ψ―¹―²–Β–Ι, –Κ–Ψ―²–Ψ―Ä–Ψ–Β ―¹–Ψ–¥–Β―Ä–Ε–Η―² –Ζ–Α–¥–Α–Ϋ–Ϋ―΄–Β –Κ–Ψ–Ϋ–Β―΅–Ϋ―΄–Β –Ω–Ψ―¹–Μ–Β–¥–Ψ–≤–Α―²–Β–Μ―¨–Ϋ–Ψ―¹―²–Η –Ϋ–Α –Ω―Ä–Ψ―²―è–Ε–Β–Ϋ–Η–Η –Ϋ–Β―¹–Κ–Ψ–Μ―¨–Κ–Η―Ö –Ω–Ψ―¹–Μ–Β–¥–Ϋ–Η―Ö ―²–Α–Κ―²–Ψ–≤, –Η ―². –¥.
–£ –Ψ–±―â–Β–Φ ―¹–Μ―É―΅–Α–Β, –Β―¹–Μ–Η –Κ–Α–Κ–Η–Φ-–Μ–Η–±–Ψ –Ω―Ä–Ψ–Η–Ζ–≤–Ψ–Μ―¨–Ϋ―΄–Φ ―¹–Ω–Ψ―¹–Ψ–±–Ψ–Φ –Ζ–Α–¥–Α–Ϋ–Ψ –±–Β―¹–Κ–Ψ–Ϋ–Β―΅–Ϋ–Ψ–Β –Φ–Ϋ–Ψ–Ε–Β―¹―²–≤–Ψ –≤―Ö–Ψ–¥–Ϋ―΄―Ö –Ω–Ψ―¹–Μ–Β–¥–Ψ–≤–Α―²–Β–Μ―¨–Ϋ–Ψ―¹―²–Β–Ι, ―²–Ψ –Ψ―¹―²–Α―ë―²―¹―è –Ψ―²–Κ―Ä―΄―²―΄–Φ –≤–Ψ–Ω―Ä–Ψ―¹ –Ψ ―²–Ψ–Φ, ―Ä–Β–≥―É–Μ―è―Ä–Ϋ–Ψ –Μ–Η ―ç―²–Ψ –Φ–Ϋ–Ψ–Ε–Β―¹―²–≤–Ψ. –î–Β–Μ–Ψ –≤ ―²–Ψ–Φ, ―΅―²–Ψ –Ω–Ψ–Ϋ―è―²–Η–Β ―Ä–Β–≥―É–Μ―è―Ä–Ϋ–Ψ–≥–Ψ –Φ–Ϋ–Ψ–Ε–Β―¹―²–≤–Α –≤–≤–Ψ–¥–Η―²―¹―è –Η–Ϋ–¥―É–Κ―²–Η–≤–Ϋ–Ψ, ―²–Ψ –Β―¹―²―¨ ―É―¹―²–Α–Ϋ–Α–≤–Μ–Η–≤–Α–Β―²―¹―è –Α–Μ–≥–Ψ―Ä–Η―²–Φ –Ω–Ψ―¹―²―Ä–Ψ–Β–Ϋ–Η―è –Μ―é–±―΄―Ö ―Ä–Β–≥―É–Μ―è―Ä–Ϋ―΄―Ö –Φ–Ϋ–Ψ–Ε–Β―¹―²–≤. –û–¥–Ϋ–Α–Κ–Ψ, –Ϋ–Β ―¹―É―â–Β―¹―²–≤―É–Β―² –¥–Ψ―¹―²–Α―²–Ψ―΅–Ϋ–Ψ ―ç―³―³–Β–Κ―²–Η–≤–Ϋ–Ψ–≥–Ψ ―¹–Ω–Ψ―¹–Ψ–±–Α ―Ä–Β―à–Β–Ϋ–Η―è –Ψ–±―Ä–Α―²–Ϋ–Ψ–Ι –Ζ–Α–¥–Α―΅–Η, ―²–Ψ –Β―¹―²―¨ ―É―¹―²–Α–Ϋ–Ψ–≤–Μ–Β–Ϋ–Η―è ―²–Ψ–≥–Ψ, ―è–≤–Μ―è–Β―²―¹―è –Μ–Η –Κ–Α–Ε–¥–Ψ–Β –Ζ–Α–¥–Α–Ϋ–Ϋ–Ψ–Β –Φ–Ϋ–Ψ–Ε–Β―¹―²–≤–Ψ ―Ä–Β–≥―É–Μ―è―Ä–Ϋ―΄–Φ.
–Ξ–Ψ―²―è ―²–Β–Ψ―Ä–Β–Φ―΄ –ö–Μ–Η–Ϋ–Η –Η –Ψ―²–≤–Β―΅–Α―é―² –Ϋ–Α –≤–Ψ–Ω―Ä–Ψ―¹ –Ψ ―²–Ψ–Φ, ―΅―²–Ψ –Φ–Ψ–Ε–Β―² –¥–Β–Μ–Α―²―¨ –Κ–Ψ–Ϋ–Β―΅–Ϋ―΄–Ι –Α–≤―²–Ψ–Φ–Α―², –Ϋ–Ψ –Ψ―²–≤–Β―΅–Α―é―² –Ψ–Ϋ–Η –Ϋ–Α ―ç―²–Ψ―² –≤–Ψ–Ω―Ä–Ψ―¹ –Ϋ–Β―ç―³―³–Β–Κ―²–Η–≤–Ϋ–Ψ. –Γ–¥–Β–Μ–Α–Ϋ―΄ –Ω–Β―Ä–≤―΄–Β –Ω–Ψ–Ω―΄―²–Κ–Η –Ω–Ψ―¹―²―Ä–Ψ–Β–Ϋ–Η―è –Η–Ϋ―΄―Ö ―è–Ζ―΄–Κ–Ψ–≤, –Ϋ–Α –Κ–Ψ―²–Ψ―Ä―΄―Ö –Ψ―²–≤–Β―² –Φ–Ψ–Ε–Β―² –±―΄―²―¨ –¥–Α–Ϋ ―ç―³―³–Β–Κ―²–Η–≤–Ϋ–Ψ. –≠―²–Α –Ω―Ä–Ψ–±–Μ–Β–Φ–Α ―è–Ζ―΄–Κ–Α, –Η–≥―Ä–Α―é―â–Α―è –Κ–Α―Ä–¥–Η–Ϋ–Α–Μ―¨–Ϋ―É―é ―Ä–Ψ–Μ―¨ –≤ –Ω–Ψ–Μ―É―΅–Β–Ϋ–Η–Η ―ç―³―³–Β–Κ―²–Η–≤–Ϋ–Ψ–≥–Ψ –Ψ―²–≤–Β―²–Α –Ϋ–Α –≤–Ψ–Ω―Ä–Ψ―¹, ―΅―²–Ψ –Φ–Ψ–Ε–Β―² –Η ―΅―²–Ψ –Ϋ–Β –Φ–Ψ–Ε–Β―² ¬Ϊ–¥–Β–Μ–Α―²―¨¬Μ –Κ–Ψ–Ϋ–Β―΅–Ϋ―΄–Ι –Α–≤―²–Ψ–Φ–Α―², –Η–Φ–Β–Β―² ―Ä–Β―à–Α―é―â–Β–Β –Ζ–Ϋ–Α―΅–Β–Ϋ–Η–Β –Η –¥–Μ―è –Ω–Β―Ä–≤―΄―Ö ―ç―²–Α–Ω–Ψ–≤ ―¹–Η–Ϋ―²–Β–Ζ–Α –Α–≤―²–Ψ–Φ–Α―²–Α, ―²–Ψ –Β―¹―²―¨ –¥–Μ―è –Ψ―²–≤–Β―²–Α –Ϋ–Α –≤―²–Ψ―Ä–Ψ–Ι –Η–Ζ ―¹―³–Ψ―Ä–Φ―É–Μ–Η―Ä–Ψ–≤–Α–Ϋ–Ϋ―΄―Ö –≤―΄―à–Β –≤–Ψ–Ω―Ä–Ψ―¹–Ψ–≤. –ï―¹–Μ–Η ―Ä–Α―¹―à–Η―Ä–Η―²―¨ –Κ–Μ–Α―¹―¹ –¥–Η–Ϋ–Α–Φ–Η―΅–Β―¹–Κ–Η―Ö ―¹–Η―¹―²–Β–Φ, –Κ–Ψ―²–Ψ―Ä―΄–Β –Φ―΄ –Ψ–Ω―Ä–Β–¥–Β–Μ–Η–Μ–Η ―²–Β―Ä–Φ–Η–Ϋ–Α–Φ–Η ¬Ϊ–Κ–Ψ–Ϋ–Β―΅–Ϋ―΄–Ι –Α–≤―²–Ψ–Φ–Α―²¬Μ –Η ¬Ϊ–Ω–Ψ―¹–Μ–Β–¥–Ψ–≤–Α―²–Β–Μ―¨–Ϋ–Ψ―¹―²–Ϋ–Α―è –Φ–Α―à–Η–Ϋ–Α¬Μ, –≤–Κ–Μ―é―΅–Β–Ϋ–Η–Β–Φ –±–Β―¹–Κ–Ψ–Ϋ–Β―΅–Ϋ–Ψ–Ι –Ω–Α–Φ―è―²–Η (–Φ–Ψ–¥–Β–Μ―¨―é –±–Β―¹–Κ–Ψ–Ϋ–Β―΅–Ϋ–Ψ–Ι –Ω–Α–Φ―è―²–Η –Φ–Ψ–Ε–Β―² –±―΄―²―¨, –Ϋ–Α–Ω―Ä–Η–Φ–Β―Ä, –±–Β―¹–Κ–Ψ–Ϋ–Β―΅–Ϋ–Α―è –Μ–Β–Ϋ―²–Α –¥–Μ―è ―Ö―Ä–Α–Ϋ–Β–Ϋ–Η―è ―¹–Η–Φ–≤–Ψ–Μ–Ψ–≤ –Η–Μ–Η –±–Β―¹–Κ–Ψ–Ϋ–Β―΅–Ϋ–Ψ–Β ―΅–Η―¹–Μ–Ψ ―¹–Ψ―¹―²–Ψ―è–Ϋ–Η–Ι), ―²–Ψ –¥–Μ―è –¥–Η–Ϋ–Α–Φ–Η―΅–Β―¹–Κ–Η―Ö ―¹–Η―¹―²–Β–Φ ―ç―²–Ψ–≥–Ψ –±–Ψ–Μ–Β–Β ―à–Η―Ä–Ψ–Κ–Ψ–≥–Ψ –Κ–Μ–Α―¹―¹–Α (–Α–±―¹―²―Ä–Α–Κ―²–Ϋ―΄–Β ―¹–Η―¹―²–Β–Φ―΄ ―ç―²–Ψ–≥–Ψ –Κ–Μ–Α―¹―¹–Α –Ϋ–Α–Ζ―΄–≤–Α―é―² –Φ–Α―à–Η–Ϋ–Α–Φ–Η –Δ―¨―é―Ä–Η–Ϋ–≥–Α) –Ψ―²–≤–Β―² –Ϋ–Α –≤–Ψ–Ω―Ä–Ψ―¹ ¬Ϊ―΅―²–Ψ –Ψ–Ϋ–Η –Φ–Ψ–≥―É―² –¥–Β–Μ–Α―²―¨?¬Μ –Ζ–Ϋ–Α―΅–Η―²–Β–Μ―¨–Ϋ–Ψ –Ω―Ä–Ψ―â–Β βÄî –Ψ–Ϋ–Η –Φ–Ψ–≥―É―² ―Ä–Β–Α–Μ–Η–Ζ–Ψ–≤–Α―²―¨ –Μ―é–±–Ψ–Ι –Ϋ–Α–Ω–Β―Ä―ë–¥ –Ζ–Α–¥–Α–Ϋ–Ϋ―΄–Ι –Α–Μ–≥–Ψ―Ä–Η―²–Φ. –ü―Ä–Η ―ç―²–Ψ–Φ ―¹–Α–Φ–Ψ –Ω–Ψ–Ϋ―è―²–Η–Β –Α–Μ–≥–Ψ―Ä–Η―²–Φ–Α ―²―Ä–Α–Κ―²―É–Β―²―¹―è –≤ ―¹–Ψ–≤―Ä–Β–Φ–Β–Ϋ–Ϋ–Ψ–Ι –Φ–Α―²–Β–Φ–Α―²–Η–Κ–Β –Κ–Α–Κ ―Ä–Β–Α–Μ–Η–Ζ–Α―Ü–Η―è –≤―΄―΅–Η―¹–Μ–Β–Ϋ–Η―è –Ζ–Ϋ–Α―΅–Β–Ϋ–Η–Ι –Κ–Α–Κ–Ψ–Ι-–Μ–Η–±–Ψ ―Ä–Β–Κ―É―Ä―¹–Η–≤–Ϋ–Ψ–Ι ―³―É–Ϋ–Κ―Ü–Η–Η. –Γ―²–Ψ–Μ―¨ –Ψ–¥–Ϋ–Ψ–Ζ–Ϋ–Α―΅–Ϋ―΄–Ι –Η ―΅―ë―²–Κ–Η–Ι –Ψ―²–≤–Β―² –Ϋ–Α –≤–Ψ–Ω―Ä–Ψ―¹ ¬Ϊ―΅―²–Ψ –Φ–Ψ–Ε–Β―² –¥–Β–Μ–Α―²―¨ –Φ–Α―à–Η–Ϋ–Α –Δ―¨―é―Ä–Η–Ϋ–≥–Α?¬Μ –¥–Α―ë―² –≤–Ψ–Ζ–Φ–Ψ–Ε–Ϋ–Ψ―¹―²―¨ –Ω–Ψ–Μ–Ψ–Ε–Η―²―¨ –Ω–Ψ–Ϋ―è―²–Η–Β –Ψ –Φ–Α―à–Η–Ϋ–Β –Δ―¨―é―Ä–Η–Ϋ–≥–Α –≤ –Ψ―¹–Ϋ–Ψ–≤―É –Ψ–Ω―Ä–Β–¥–Β–Μ–Β–Ϋ–Η―è –Ω–Ψ–Ϋ―è―²–Η―è –Α–Μ–≥–Ψ―Ä–Η―²–Φ–Α: –Α–Μ–≥–Ψ―Ä–Η―²–Φ–Ψ–Φ –Ϋ–Α–Ζ―΄–≤–Α–Β―²―¹―è –Μ―é–±–Ψ–Ι –Ω―Ä–Ψ―Ü–Β―¹―¹, –Κ–Ψ―²–Ψ―Ä―΄–Ι –Φ–Ψ–Ε–Β―² –±―΄―²―¨ –Ψ―¹―É―â–Β―¹―²–≤–Μ―ë–Ϋ –Ϋ–Α –Κ–Ψ–Ϋ–Β―΅–Ϋ–Ψ–Φ –Α–≤―²–Ψ–Φ–Α―²–Β, –¥–Ψ–Ω–Ψ–Μ–Ϋ–Β–Ϋ–Ϋ–Ψ–Φ –±–Β―¹–Κ–Ψ–Ϋ–Β―΅–Ϋ–Ψ–Ι –Ω–Α–Φ―è―²―¨―é, ―²–Ψ –Β―¹―²―¨ –Α–Μ–≥–Ψ―Ä–Η―²–Φ–Η―΅–Β―¹–Κ–Η –Ω–Ψ–Μ–Ϋ―΄―Ö –Φ–Α―à–Η–Ϋ–Α―Ö, –Ϋ–Α –Φ–Α―à–Η–Ϋ–Β –Δ―¨―é―Ä–Η–Ϋ–≥–Α, –Ϋ–Α –Φ–Α―à–Η–Ϋ–Β –ü–Ψ―¹―²–Α –Η –¥―Ä.
–Γ–Φ. ―²–Α–Κ–Ε–Β
–ü―Ä–Η–Φ–Β―΅–Α–Ϋ–Η―è
- βÜë –ö―É–Ζ–Ϋ–Β―Ü–Ψ–≤ –û. –ü., –ê–¥–Β–Μ―¨―¹–Ψ–Ϋ-–£–Β–Μ―¨―¹–Κ–Η–Ι –™. –€. –ê–≤―²–Ψ–Φ–Α―²―΄ // –î–Η―¹–Κ―Ä–Β―²–Ϋ–Α―è –Φ–Α―²–Β–Φ–Α―²–Η–Κ–Α –¥–Μ―è –Η–Ϋ–Ε–Β–Ϋ–Β―Ä–Α. βÄî –€.: –≠–Ϋ–Β―Ä–≥–Η―è, 1980. βÄî 344 ―¹.
- βÜë –ê–Ι–Ζ–Β―Ä–Φ–Α–Ϋ –€. –ê., –™―É―¹–Β–≤ –¦. –ê., –†–Ψ–Ζ–Ψ–Ϋ–Ψ―ç―Ä –¦. –‰., –Γ–Φ–Η―Ä–Ϋ–Ψ–≤–Α –‰. –€., –Δ–Α–Μ―¨ –ê. –ê. –¦–Ψ–≥–Η–Κ–Α. –ê–≤―²–Ψ–Φ–Α―²―΄. –ê–Μ–≥–Ψ―Ä–Η―²–Φ―΄. –™–Ψ―¹. –Η–Ζ–¥. ―³–Η–Ζ.-–Φ–Α―². –Μ–Η―²–Β―Ä–Α―²―É―Ä―΄ 1963, 556 ―¹―²―Ä.
–¦–Η―²–Β―Ä–Α―²―É―Ä–Α
- –ë–Β–Μ–Ψ―É―¹–Ψ–≤ –ê. –‰., –Δ–Κ–Α―΅―ë–≤ –Γ. –ë. –î–Η―¹–Κ―Ä–Β―²–Ϋ–Α―è –Φ–Α―²–Β–Φ–Α―²–Η–Κ–Α. βÄî –€.: –€–™–Δ–Θ, 2006. βÄî –Γ. 460βÄî587. βÄî ISBN 5-7038-2886-4.
- –î–Ε–Ψ–Ϋ –Ξ–Ψ–Ω–Κ―Ä–Ψ―³―², –†–Α–¥–Ε–Η–≤ –€–Ψ―²–≤–Α–Ϋ–Η, –î–Ε–Β―³―³―Ä–Η –Θ–Μ―¨–Φ–Α–Ϋ. –î–Η―¹–Κ―Ä–Β―²–Ϋ–Α―è –Φ–Α―²–Β–Φ–Α―²–Η–Κ–Α. βÄî 2-–Β –Η–Ζ–¥. βÄî –£–Η–Μ―¨―è–Φ―¹, 2002. βÄî 528 ―¹. βÄî (–ê–Μ–≥–Ψ―Ä–Η―²–Φ―΄ –Η –Φ–Β―²–Ψ–¥―΄. –‰―¹–Κ―É―¹―¹―²–≤–Ψ –Ω―Ä–Ψ–≥―Ä–Α–Φ–Φ–Η―Ä–Ψ–≤–Α–Ϋ–Η―è).
- –Γ–Β―Ä–Β–±―Ä―è–Κ–Ψ–≤ –£. –ê., –™–Α–Μ–Ψ―΅–Κ–Η–Ϋ –€. –ü., –™–Ψ–Ϋ―΅–Α―Ä –î. –†., –Λ―É―Ä―É–≥―è–Ϋ –€. –™. –Δ–Β–Ψ―Ä–Η―è –Η ―Ä–Β–Α–Μ–Η–Ζ–Α―Ü–Η―è ―è–Ζ―΄–Κ–Ψ–≤ –Ω―Ä–Ψ–≥―Ä–Α–Φ–Φ–Η―Ä–Ψ–≤–Α–Ϋ–Η―è βÄî –€.: –€–½-–ü―Ä–Β―¹―¹, 2006 –≥., 2-–Β –Η–Ζ–¥. βÄî ISBN 5-94073-094-9
- –Δ–Β–Ψ―Ä–Η―è –Α–≤―²–Ψ–Φ–Α―²–Ψ–≤ / –≠. –ê. –·–Κ―É–±–Α–Ι―²–Η―¹, –£. –û. –£–Α―¹―é–Κ–Β–≤–Η―΅, –ê. –°. –™–Ψ–±–Ζ–Β–Φ–Η―¹, –ù. –ï. –½–Α–Ζ–Ϋ–Ψ–≤–Α, –ê. –ê. –ö―É―Ä–Φ–Η―², –ê. –ê. –¦–Ψ―Ä–Β–Ϋ―Ü, –ê. –Λ. –ü–Β―²―Ä–Β–Ϋ–Κ–Ψ, –£. –ü. –ß–Α–Ω–Β–Ϋ–Κ–Ψ // –Δ–Β–Ψ―Ä–Η―è –≤–Β―Ä–Ψ―è―²–Ϋ–Ψ―¹―²–Β–Ι. –€–Α―²–Β–Φ–Α―²–Η―΅–Β―¹–Κ–Α―è ―¹―²–Α―²–Η―¹―²–Η–Κ–Α. –Δ–Β–Ψ―Ä–Β―²–Η―΅–Β―¹–Κ–Α―è –Κ–Η–±–Β―Ä–Ϋ–Β―²–Η–Κ–Α. βÄî –€.: –£–‰–ù–‰–Δ–‰, 1976. βÄî –Δ. 13. βÄî –Γ. 109βÄî188. βÄî URL http://www.mathnet.ru/php/getFT.phtml?jrnid=intv&paperid=28&what=fullt&option_lang=rus
- –ü―Ä–Η–Φ–Β–Ϋ–Β–Ϋ–Η–Β –Κ–Ψ–Ϋ–Β―΅–Ϋ―΄―Ö –Α–≤―²–Ψ–Φ–Α―²–Ψ–≤ –¥–Μ―è ―Ä–Β―à–Β–Ϋ–Η―è –Ζ–Α–¥–Α―΅ –Α–≤―²–Ψ–Φ–Α―²–Η–Ζ–Α―Ü–Η–Η
- –™–Μ―É―à–Κ–Ψ–≤ –£. –€. –Γ–Η–Ϋ―²–Β–Ζ ―Ü–Η―³―Ä–Ψ–≤―΄―Ö –Α–≤―²–Ψ–Φ–Α―²–Ψ–≤. βÄî –€.: –™–‰–Λ–€–¦, 1962. βÄî 476 ―¹.
–Γ―¹―΄–Μ–Κ–Η
 |
|---|
| –û–±―â–Η–Β –Ω–Ψ–Ϋ―è―²–Η―è | |
|---|
| –Δ–Η–Ω 0 | |
|---|
| –Δ–Η–Ω 1 | |
|---|
| –Δ–Η–Ω 2 | |
|---|
| –Δ–Η–Ω 3 | |
|---|
| –Γ–Η–Ϋ―²–Α–Κ―¹–Η―΅–Β―¹–Κ–Η–Ι –Α–Ϋ–Α–Μ–Η–Ζ | |
|---|
–Γ―¹―΄–Μ–Κ–Η –Ϋ–Α –≤–Ϋ–Β―à–Ϋ–Η–Β ―Ä–Β―¹―É―Ä―¹―΄ |
|---|
–£ –±–Η–±–Μ–Η–Ψ–≥―Ä–Α―³–Η―΅–Β―¹–Κ–Η―Ö –Κ–Α―²–Α–Μ–Ψ–≥–Α―Ö | |
|---|




