ะฃ ััะพะณะพ ัะตัะผะธะฝะฐ ัััะตััะฒััั ะธ ะดััะณะธะต ะทะฝะฐัะตะฝะธั, ัะผ.
Siam ะธ
Little David .
ะัะฟััะฐะฝะธั ัะฐะบะตัั ะฝะฐ ะฟะพะปะธะณะพะฝะต ยซะฃะฐะนั-ะกะตะฝะดะทยป ะฟะพ ะฑะตัะฟะธะปะพัะฝะพะผั ะฒะตััะพะปััั-ะผะธัะตะฝะธ ยซะัั ยป SIAM ([saษชหรฆm] ะฑัะบั. ะพั Self Initiated Anti-Aircraft Missile , ะฑัะบะฒะฐะปัะฝะพ ยซัะฐะผะพะทะฐะฟััะบะฐััะฐััั ะทะตะฝะธัะฝะฐั ัะฐะบะตัะฐ ยป) โ ะฐะผะตัะธะบะฐะฝัะบะฐั ัะฐะผะพะทะฐะฟััะบะฐััะฐััั ะทะตะฝะธัะฝะฐั ัะฟัะฐะฒะปัะตะผะฐั ัะฐะบะตัะฐ (ะะฃะ ) ะธ ะฟัะธัะฟะพัะพะฑะปะตะฝะฝะฐั ะดะปั ะธัะฟะพะปัะทะพะฒะฐะฝะธั ะฒ ะบะฐัะตััะฒะต ะฟัะพัะธะฒะพะฒะพะทะดััะฝะพะน ะผะธะฝั . ะัะปะฐ ัะฐะทัะฐะฑะพัะฐะฝะฐ ะบะพะผะฟะฐะฝะธะตะน Ford Aerospace [ะฐะฝะณะป.] Ford ) ัะพะฒะผะตััะฝะพ ั Librascope (ะฟะพะดัะฐะทะดะตะปะตะฝะธะต ะบะพัะฟะพัะฐัะธะธ Singer ) ะฟะพ ะทะฐะบะฐะทั ะะณะตะฝัััะฒะฐ ะฟะพ ะฟะตััะฟะตะบัะธะฒะฝัะผ ะพะฑะพัะพะฝะฝัะผ ะฝะฐััะฝะพ-ะธััะปะตะดะพะฒะฐัะตะปััะบะธะผ ัะฐะทัะฐะฑะพัะบะฐะผ (DARPA) ั ะฝะฐัะฐะปะฐ 1970-ั
ะฟะพ ะฝะฐัะฐะปะพ 1980-ั
ะณะณ. ะ ัะบะพะฒะพะดััะฒะพ ั
ะพะดะพะผ ัะฐะฑะพั ะฟะพ ะฟัะพะตะบัั ะพัััะตััะฒะปัะปะพัั ะฃะฟัะฐะฒะปะตะฝะธะตะผ ัะฐะบะตัะฝัั
ะฒะพะนัะบ ะัะผะธะธ ะกะจะ[ 1] ะณะพะปะพะฒะบะพะน ัะฐะผะพะฝะฐะฒะตะดะตะฝะธั (ะะกะ), ัะฐะผะพััะพััะตะปัะฝะพ ะทะฐะฟัััะธัััั ะธ ะฟะพัะฐะทะธัั ะพะฑะฝะฐััะถะตะฝะฝะพะต ััะตะดััะฒะพ ะฒะพะทะดััะฝะพะณะพ ะฝะฐะฟะฐะดะตะฝะธั (ะกะะ) ะฟัะพัะธะฒะฝะธะบะฐ. ะกัะธัะฐะตััั ะฟะตัะฒัะผ ะฒ ะผะธัะต ะฟะพะปะฝะพัััั ะฐะฒัะพะผะฐัะธัะตัะบะธะผ ะทะตะฝะธัะฝัะผ ัะฐะบะตัะฝัะผ ะบะพะผะฟะปะตะบัะพะผ (ะฝะต ััะตะฑัะตั ัะพะฟััะณะฐะตะผัั
ััะตะดััะฒ ะพะฑะตัะฟะตัะตะฝะธั ะทะฐะฟััะบะฐ ะธ ัะธััะตะผั ัะฟัะฐะฒะปะตะฝะธั ะพะณะฝัะผ, ะพะฑั
ะพะดะธััั ะฑะตะท ะฒะฝะตัะฝะตะณะพ ัะตะปะตัะบะฐะทะฐะฝะธั) ะธ ะฟะตัะฒะพะน ะฒ ะผะธัะต ะทะตะฝะธัะฝะพะน ะผะธะฝะพะน ะฟะพะดะฒะพะดะฝะพะณะพ ะฑะฐะทะธัะพะฒะฐะฝะธั[ 1]
SIAM ะฟัะตะดะฝะฐะทะฝะฐัะฐะปัั ะดะปั ะฟะพัะฐะถะตะฝะธั ัะตะปะตะน ัะธะฟะฐ ยซะธัััะตะฑะธัะตะปัยป ะฝะฐ ะฒะทะปััะต ะฟัะธ ัะฐะผะพะทะฐะฟััะบะต ะธะท ะฝะฐะทะตะผะฝะพะณะพ ะบะพะฝัะตะนะฝะตัะฐ ะธ ยซะฟัะพัะธะฒะพะปะพะดะพัะฝัะน ะฒะตััะพะปััยป ะฟัะธ ัััะตะปัะฑะต ั ะฟะพะดะฒะพะดะฝัั
ะปะพะดะพะบ ะฒ ะฟะพะณััะถะตะฝะฝะพะผ ัะพััะพัะฝะธะธ
ะ ะฟะตัะฒะพะน ะฟะพะปะพะฒะธะฝะต 1970-ั
ะะะ ะะ ะฝะฐัะฐะปะพ ัะฐะฑะพัั ะฟะพ ะฟัะพะณัะฐะผะผะต ั ะบะพะดะพะฒัะผ ะฝะฐะทะฒะฐะฝะธะตะผ ยซะะธััะป ะัะฒะธะด ยป (Little David )[ 2] ะะะ , ะะะ ะธ ะงะกะกะ . ะะธะฝั ะฐะบัะธะฒะธะทะธัะพะฒะฐะปะธัั ะพั ััะฐะฑะฐััะฒะฐะฝะธั ะฐะบัััะธัะตัะบะพะณะพ ะดะฐััะธะบะฐ, ะฝะฐัััะพะตะฝะฝะพะณะพ ะฝะฐ ััะผ ะฒะทะปะตัะฐััะตะณะพ ัะฐะผะพะปััะฐ (ัะฑะธะฒะฐัั ะกะะ ะฟัะตะดะฟะพะปะฐะณะฐะปะพัั ะฝะฐ ะฒะทะปััะต, ะบะพะณะดะฐ ัะฐะผะพะปัั ะตัั ะฝะต ะฝะฐะฑัะฐะป ะฑะพะปััะพะน ัะบะพัะพััะธ ะธ ะฒััะพัั).[ 3] airfield denial ).[ 2] [ 2] [ 3] ะะะ ะ ยซะ ะตะดะฐะน ยป.[ 2] ะผะตัะพะด ะฟัะพะฟะพััะธะพะฝะฐะปัะฝะพะณะพ ัะฑะปะธะถะตะฝะธั (ัะธะฟะธัะฝัะน ะดะปั ัะฐะผะพะฝะฐะฒะพะดััะธั
ัั ะทะตะฝะธัะฝัั
ัะฐะบะตั), ะปะธะฑะพ ะผะตัะพะด ะฟะพะณะพะฝะธ , ะปะธะฑะพ ะบะพะผะฑะธะฝะธัะพะฒะฐะฝะฝัะน ะดะฒัั
ัะพัะตัะฝัะน ะผะตัะพะด ะฝะฐะฒะตะดะตะฝะธั ะฝะฐ ะพัะฝะพะฒะต ะดะฒัั
ะฒััะตะฝะฐะทะฒะฐะฝะฝัั
, ะผะตะฝัั ััะฐะตะบัะพัะธั ะฟะพะปััะฐ ะฒ ะทะฐะฒะธัะธะผะพััะธ ะพั ะดะตะนััะฒะธะน ะฟัะตัะปะตะดัะตะผะพะณะพ ะกะะ, ะดะปั ััะธั
ัะตะปะตะน ะฒ ะฟัะพะณัะฐะผะผะฝะพะต ะพะฑะตัะฟะตัะตะฝะธะต ะะกะ ะฑัะปะธ ะทะฐะปะพะถะตะฝั ะฟะฐัะฐะผะตััั ะฟััะธ ััะฐะฝะดะฐััะฝัั
ะฟัะพัะธะฒะพัะฐะบะตัะฝัั
ะผะฐะฝัะฒัะพะฒ , ะบ ะบะพัะพััะผ ะผะพะณะปะธ ะฟัะธะฑะตะณะฝััั ัะพะฒะตััะบะธะต ะปัััะธะบะธ[ 4] ัะตะฐะบัะธะฒะฝะพะน ััะณะธ ะดะฒะธะณะฐัะตะปั, ะพะฑััะปะพะฒะปะตะฝะฝะพะน ะณะฐะทะพะดะธะฝะฐะผะธะบะพะน ะฟัะพัะตััะฐ ัะณะพัะฐะฝะธั ัะฒััะดะพะณะพ ัะพะฟะปะธะฒะฐ. ะ ะณะพะปะพะฒะฝะพะน ัะฐััะธ ัะฐะบะตัั ัะฐัะฟะพะปะฐะณะฐะปัั ะฝะตะบะพะฝัะฐะบัะฝัะน ะดะฐััะธะบ ัะตะปะธ ัะพะฟััะถัะฝะฝัะน ั ะฟัะตะดะพั
ัะฐะฝะธัะตะปัะฝะพ-ะธัะฟะพะปะฝะธัะตะปัะฝัะผ ะผะตั
ะฐะฝะธะทะผะพะผ ะธ ััะฐะฑะฐััะฒะฐะฒัะธะน ะฝะฐ ะฟัะธะฑะปะธะถะตะฝะธะต ะบ ัะตะปะธ. ะะตัะพััะฝะพะต ะฟัะพัััะฐะฝััะฒะตะฝะฝะพะต ะพัะบะปะพะฝะตะฝะธะต ัะฐะบะตัั ะพั ัะตะปะธ ะฟัะธ ะฝะพัะผะฐะปัะฝะพะน ัะฐะฑะพัะต ะะกะ ะบะพะปะตะฑะฐะปะพัั ะฒ ะฟัะตะดะตะปะฐั
ะพั 0 ะดะพ 6 ะผะตััะพะฒ[ 5] 1977 ะณะพะดั ัะฒะตะดะตะฝะธั ะพ ะฟัะพะณัะฐะผะผะต ะฒะฟะตัะฒัะต ะฟะพัะฒะธะปะธัั ะฒ ะฟัะตััะต. ะะพะดะพะฑะฝัะต ยซะผะธะฝัยป, ะฟะพ ะผะฝะตะฝะธั ัะฐะทัะฐะฑะพััะธะบะพะฒ, ะผะพะณะปะธ ะฑััั ะธัะฟะพะปัะทะพะฒะฐะฝั ะดะปั ัะพะทะดะฐะฝะธั ัะฐะนะพะฝะพะฒ ะฟัะพัะธะฒะพะฒะพะทะดััะฝะพะน ะพะฑะพัะพะฝั ะฒ ัััะดะฝะพะดะพัััะฟะฝัั
ะพะฑะปะฐัััั
(ะฝะฐะฟัะธะผะตั, ะฒ ัะตะฒะตัะฝัั
ะฟัะพะฒะธะฝัะธัั
ะะฐะฝะฐะดั ะธะปะธ ะฒ ะฐัะบัะธัะตัะบะธั
ะปัะดะฐั
), ะณะดะต ัะฐะทะผะตัะตะฝะธะต ะธ ะพะฑัะปัะถะธะฒะฐะฝะธะต ััะฐะดะธัะธะพะฝะฝัั
ะะ ะ ะฑัะปะพ ะฑั ะธะทะปะธัะฝะต ะดะพัะพะณะพ. ะ ะฐััะผะฐััะธะฒะฐะปะฐัั ะธ ะฒะพะทะผะพะถะฝะพััั ยซะฐะบัะธะฒะฝัั
ะผะธะฝะฝัั
ะฟะพััะฐะฝะพะฒะพะบยป โ ัะฐะทะผะตัะตะฝะธั ะฐะฒัะพะฝะพะผะฝัั
ัะฐะบะตัะฝัั
ะฑะฐัะฐัะตะน ะฝะฐ ัะตััะธัะพัะธะธ ะฟัะพัะธะฒะฝะธะบะฐ ั ะฟะพะผะพััั ะฑะพะผะฑะฐัะดะธัะพะฒัะธะบะพะฒ, ั ัะตะปัั ะพัะปะพะถะฝะธัั ะดะตะนััะฒะธั ะฝะตะฟัะธััะตะปััะบะพะน ะฐะฒะธะฐัะธะธ ั ะตั ะฐะฒะธะฐะฑะฐะท. ะัะธะฒะปะตััะฝะฝัะต ะฒ ะบะฐัะตััะฒะต ะฟะพะดััะดัะธะบะพะฒ ะบะพะผะฟะฐะฝะธะธ ยซะคะพัะด ะฐััะพัะฟะตะนัยป ะธ ยซะะธะฑัะฐัะบะพะฟยป ะพัะฒะตัะฐะปะธ ะทะฐ ัะฐะทัะฐะฑะพัะบั ัะฐะบะตัั ะธ ะฟะพะดะฒะพะดะฝัะต ะฐัะฟะตะบัั ะตั ะฟัะธะผะตะฝะตะฝะธั ัะพะพัะฒะตัััะฒะตะฝะฝะพ. ะ ัะฐะฑะพัะต ะฝะฐะด ะธะฝััะฐะบัะฐัะฝะพะน ัะธััะตะผะพะน ัะฐะผะพะฝะฐะฒะตะดะตะฝะธั ะฑัะปะธ ะฟัะธะฒะปะตัะตะฝั ะกะฐะฝะดะธะนัะบะธะต ะฝะฐัะธะพะฝะฐะปัะฝัะต ะปะฐะฑะพัะฐัะพัะธะธ , ะฐะดะผะธะฝะธัััะธัะพะฒะฐะฒัะธะตัั ะฟะพ ะบะพะฝััะฐะบัั ะบะพัะฟะพัะฐัะธะตะน ยซะกะฐะฝะดะธัยป (ัะธะปะธะฐะปะพะผ AT&T ).[ 6] ะะพะฝัะตะฟััะฐะปัะฝะฐั ะฟัะพัะฐะฑะพัะบะฐ , ััะฝะดะฐะผะตะฝัะฐะปัะฝัะต ะธััะปะตะดะพะฒะฐะฝะธั ะธ ัะตั
ะฝะธัะตัะบะธะน ะฐะฝะฐะปะธะท ะฟัะพะตะบัะฐ ะฟัะพะฒะพะดะธะปะธัั ะบะพัะฟะพัะฐัะธัะผะธ ยซะ ัะฝะด ยป ะธ ยซะะถะตะฝะตัะฐะป ะดะฐะนะฝะตะผะธะบั ยป, ะฑัะปะธ ะธัะฟะพะปัะทะพะฒะฐะฝั ัะตะทัะปััะฐัั ัะฐะฑะพั, ะฟัะพะฒะตะดัะฝะฝัั
ะะตะผะฑัะธะดะถัะบะธะผะธ ะธััะปะตะดะพะฒะฐัะตะปััะบะธะผะธ ะปะฐะฑะพัะฐัะพัะธัะผะธ [ะฐะฝะณะป.] ะ ะฐะทะฒะตะดัะฒะฐัะตะปัะฝัะผ ัะฟัะฐะฒะปะตะฝะธะตะผ ะะธะฝะธััะตัััะฒะฐ ะพะฑะพัะพะฝั ะกะจะ .[ 7]
ะะพะผะฟะพะฝะพะฒะพัะฝะฐั ัั
ะตะผะฐ ัะฐะบะตัั ะกะพะณะปะฐัะฝะพ ะฟัะพะตะบัั, ะฟัะตะดะฟะพะปะฐะณะฐะปะพัั ัะพะทะดะฐัั ะฝะตะฑะพะปัััั ัะฒะตัะดะพัะพะฟะปะธะฒะฝัั ัะฐะบะตัั, ะบะพัะพัะฐั ะฑัะดะตั ะฒัััะฐะฒะปััััั ะฝะฐ ะฟะพะทะธัะธั ะฒ ััะฐะฝัะฟะพััะฝะพะผ ะบะพะฝัะตะนะฝะตัะต. ะะฑะฝะฐััะถะธะฒ ัะฐะผะพะปัั ะฟัะพัะธะฒะฝะธะบะฐ ัะฒะพะตะน ะฟะฐััะธะฒะฝะพะน ะะกะ, ัะฐะบะตัะฐ ะดะพะปะถะฝะฐ ะฑัะปะฐ ะทะฐะฟัััะธัั ะดะฒะธะณะฐัะตะปั ะธ ะฐัะฐะบะพะฒะฐัั ะปะตัะฐัะตะปัะฝัะน ะฐะฟะฟะฐัะฐั. ะกะพะณะปะฐัะฝะพ ััะตะฑะพะฒะฐะฝะธัะผ ัะฐะบัะธะบะพ-ัะตั
ะฝะธัะตัะบะพะณะพ ะทะฐะดะฐะฝะธั (ะขะขะ), ะะกะ ะดะพะปะถะฝะฐ ะฑัะปะฐ ัะบะฐะฝะธัะพะฒะฐัั ะฒะพะทะดััะฝะพะต ะฟัะพัััะฐะฝััะฒะพ ะฒ ะดะฒัั
ัะฒะตัะฝะพะผ ะดะธะฐะฟะฐะทะพะฝะต ะธ ะพะฑะตัะฟะตัะธะฒะฐัั ัััะตะบัะธะฒะฝะพะต ะพะฑะฝะฐััะถะตะฝะธะต ัะตะปะธ ัะธะฟะฐ ยซะฒะตััะพะปััยป ะฝะฐ ะดะฐะปัะฝะพัััั
ะดะพ 4,5 ะบะผ, ัะฐะบะธะผ ะพะฑัะฐะทะพะผ ะทะพะฝะฐ ะฟัะธะบัััะธั ะพะดะฝะพะน ัะฐะบะตัั ะพะฑัะฐะทะพะฒัะฒะฐะปะฐ ะบััะณ 9 ะบะผ ะฒ ะดะธะฐะผะตััะต[ 3] [ 8] ะฐะบัะธะฒะฝะพะณะพ ััะฐััะบะฐ ััะฐะตะบัะพัะธะธ ะฟะพะปััะฐ ะฑัะปะพ ะพะณัะฐะฝะธัะตะฝะพ 22 ัะตะบัะฝะดะฐะผะธ[ 9] ัััะฐะฝะพะฒะบะธ ะฒะตััะธะบะฐะปัะฝะพะณะพ ะฟััะบะฐ ะฟะพะดะฒะพะดะฝะพะน ะปะพะดะบะธ, ะฝะตะทะฐะฒะธัะธะผะพ ะพั ะฟะพะปะพะถะตะฝะธั ัะตะปะธ ะฒ ะฟัะพัััะฐะฝััะฒะต ะพัะฝะพัะธัะตะปัะฝะพ ััะฐััะพะฒะพะน ะฟะพะทะธัะธะธ, ัะฐะบะตัะฐ ะปะตัะตะปะฐ ะฒะฒะตัั
ัััะพะณะพ ะฒะตััะธะบะฐะปัะฝะพ ะดะพ ะฒััะพัั 750 ะผะตััะพะฒ, ะฟะพัะปะต ัะตะณะพ ะฝะฐัะธะฝะฐะปะฐ ะทะฐะบะปะฐะดัะฒะฐัั ะฟะตัะปั ะปะธะฑะพ ะณะพัะบั (ะฒ ะทะฐะฒะธัะธะผะพััะธ ะพั ะดะตะนััะฒะธะน ะพะฑัััะตะปะธะฒะฐะตะผะพะน ัะตะปะธ) ั ะผะฐะบัะธะผะฐะปัะฝะพะน ัะพัะบะพะน ะฒะพะทะฒััะตะฝะธั 1200 ะผะตััะพะฒ ะธ ัะพัะบะพะน ัะฐะทะฒะพัะพัะฐ ะฒ ะฝะฐะฟัะฐะฒะปะตะฝะธะธ ัะตะปะธ ะฝะฐ ะฒััะพัะต 700 ะผะตััะพะฒ. ะะถะธะดะฐะตะผะฐั ะฒััะพัะฐ ะฒัััะตัะธ ั ัะตะปัั ะฟัะธ ัะฐะบะพะผ ััะตะฝะฐัะธะธ ะฟัะธะผะตะฝะตะฝะธั ัะพััะฐะฒะปัะปะฐ ะพะบะพะปะพ 150 ะผะตััะพะฒ ะฝะฐะด ััะพะฒะฝะตะผ ะผะพัั[ 10] ะฃัะบะฐ ยป ั ะฟััะผะพัะณะพะปัะฝัะผ ะพะฟะตัะตะฝะธะตะผ ะฒ ั
ะฒะพััะพะฒะพะน ัะฐััะธ ะธ ะทะฐะบััะณะปัะฝะฝัะผ ะพะฟะตัะตะฝะธะตะผ ะฒ ะณะพะปะพะฒะฝะพะน ัะฐััะธ[ 11] ะฝะพัะผะฐะปัะฝะฐั ะฐััะพะดะธะฝะฐะผะธัะตัะบะฐั ัั
ะตะผะฐ , ะฒัะฝะตัะตะฝะฝะพะต ะฒะฟะตััะด ะพะฟะตัะตะฝะธะต ะฑัะปะพ ัะดะฐะปะตะฝะพ. ะ ะบะฐัะตััะฒะต ะผะพะดะตะปัะฝะพะน ัะตะปะธ, ะปััะฝัะต ั
ะฐัะฐะบัะตัะธััะธะบะธ ะบะพัะพัะพะน ะทะฐะบะปะฐะดัะฒะฐะปะธัั ะฒ ะฟัะพะณัะฐะผะผะฝะพะต ะพะฑะตัะฟะตัะตะฝะธะต ะธ ะธัะฟะพะปัะทะพะฒะฐะปะธัั ะฒ ะผะพะดะตะปะธัะพะฒะฐะฝะธะธ ะทะตะฝะธัะฝะพะณะพ ะฑะพั, ะฑัะป ะฒะทัั ะะธะ-21 [ 12] ะธะฝััะฐะบัะฐัะฝะพะณะพ ะธะทะปััะตะฝะธั , ะฟะพะณะพะดะฝะพ-ะบะปะธะผะฐัะธัะตัะบะธะต ัะฐะบัะพัั, ัะฐะบะธะต ะบะฐะบ ััะผะฐะฝ ะธ ะพะฑะปะฐัะฝะพััั ะฝะธะถะฝะตะณะพ ััััะฐ, ัะตะทะบะพ ัะฝะธะถะฐะปะธ ะดะฐะปัะฝะพััั ะพะฑะฝะฐััะถะตะฝะธั ัะตะปะธ ะธ, ะบะฐะบ ัะปะตะดััะฒะธะต, ะฑะพะตะฒัะต ะฒะพะทะผะพะถะฝะพััะธ SIAM[ 13] ะฟัะธัะผะฝะธะบะฐ ะธะฝััะฐะบัะฐัะฝะพะณะพ ะธะทะปััะตะฝะธั (ะฟะตัะฟะตะฝะดะธะบัะปััะฝะฐั ะฟัะพะดะพะปัะฝะพะน ะพัะธ ัะฐะบะตัั) ะธัะฟัััะฒะฐะปะฐ ะฟะธะบะพะฒัะต ะฟะพะผะตั
ะพะฒัะต ะฝะฐะณััะทะบะธ ะพั ัะพะฝะพะฒัั
ัะตะฟะปะพะฒัั
ะธ ะพะฟัะธัะตัะบะธั
ะฟะพะผะตั
, ััะพ ะณัะพะทะธะปะพ ะฟะตัะตะทะฐั
ะฒะฐัะพะผ ะฑะฐัะฐัะบะพะฒ ะฒะพะปะฝ ะฒะผะตััะพ ะธััะธะฝะฝะพะน ัะตะปะธ. ะ ัะตะถะธะผะต ะฟะฐััะธะฒะฝะพะณะพ ะฒัะถะธะดะฐะฝะธั ัะพะฝะพะฒะพะต ะธะทะปััะตะฝะธะต ะฝะตะฑะฐ ะฟัะธะฒะพะดะธะปะพ ะบ ะปะพะถะฝัะผ ััะฐะฑะฐััะฒะฐะฝะธัะผ (ะธะผะตะฝะฝะพ ะฟะพัะพะผั ะฒ ะบะฐัะตััะฒะต ะฐะบัะธะฒะฐัะพัะฐ ัะฐะบะตัั ะฑัะป ะธะทะฑัะฐะฝ ะฐะบัััะธัะตัะบะธะน ะดะฐััะธะบ, ะพัะธะตะฝัะธัะพะฒะฐะฒัะธะนัั ะฝะฐ ะทะฒัะบ ะฒะทะปะตัะฐััะตะณะพ ัะฐะผะพะปััะฐ), ะฒ ัะฒัะทะธ ั ัะตะผ, ะพั ะผะพะผะตะฝัะฐ ะพะฑะฝะฐััะถะตะฝะธั ัะตะปะธ ะดะพ ะทะฐะฟััะบะฐ ัะฐะบะตัั ะฟัะพั
ะพะดะธะปะพ ะพะฟัะตะดะตะปัะฝะฝะพะต ะฒัะตะผั, ะฝะตะพะฑั
ะพะดะธะผะพะต ะดะปั ัะพะณะพ, ััะพะฑั ะฑะพััะพะฒะฐั ะฐะฟะฟะฐัะฐัััะฐ ัะฐะบะตัั ัะดะพััะพะฒะตัะธะปะฐัั ะฒ ัะพะผ, ััะพ ัะพะฟัะพะฒะพะถะดะฐะตะผัะน ะพะฑัะตะบั ะดะตะนััะฒะธัะตะปัะฝะพ ัะฒะปัะตััั ะปะตัะฐัะตะปัะฝัะผ ะฐะฟะฟะฐัะฐัะพะผ, ะฐ ะฝะต ะพััะฐะถัะฝะฝัะผะธ ัะพะปะฝะตัะฝัะผะธ ะปััะฐะผะธ[ 14] ะผะธะบัะพะฒะฐััะฐั
ะฝะฐ ัะผยฒ ), ะธะผะตะฝะฝะพ ะฒะพะดะฝะฐั ะฟะพะฒะตัั
ะฝะพััั ะพะฑะปะฐะดะฐะปะฐ ะฝะฐะธะฑะพะปััะตะน ะพัะฒะปะตะบะฐััะตะน ัะฟะพัะพะฑะฝะพัััั[ 15] [ 8] ัะฒะตัะพัะธะปัััะพะฒ , ัะฝะธะถะฐะฒัะธั
ัะฒะตัะพััะฒััะฒะธัะตะปัะฝะพััั ะฟัะธัะผะฝะธะบะฐ ะธะฝััะฐะบัะฐัะฝะพะณะพ ะธะทะปััะตะฝะธั ะดะพ ััะตะฑัะตะผัั
ะทะฝะฐัะตะฝะธะน, ััะพะฑั ะผะธะฝะธะผะธะทะธัะพะฒะฐัั ะปะพะถะฝัะต ััะฐะฑะฐััะฒะฐะฝะธั ะธ ะธัะบะปััะธัั ะพัะบะปะพะฝะตะฝะธะต ัะฐะบะตัั ะพั ัะตะปะธ ะฝะฐ ัะพะปะฝะตัะฝัะต ะฑะปะธะบะธ ะธะปะธ ัะตะฟะปะพะฒัะต ะปะพะฒััะบะธ ะฟัะธะฒะพะดะธะปะฐ ะบ ัะฝะธะถะตะฝะธั ัััะตะบัะธะฒะฝะพะน ะดะฐะปัะฝะพััะธ ะพะฑะฝะฐััะถะตะฝะธั ัะตะปะตะน ะะกะ ะธ ะบ ะตั ะฝะตัะฟะพัะพะฑะฝะพััะธ ัะฐะผะพััะพััะตะปัะฝะพ ะพะฑะฝะฐััะถะธัั ะธ ะทะฐั
ะฒะฐัะธัั ัะตะปั[ 15] ะฟะพะปัะฟัะพะฒะพะดะฝะธะบะพะฒัะผ ะผะฐัะตัะธะฐะปะพะผ ะฟัะธัะผะฝะธะบะฐ ะธะฝััะฐะบัะฐัะฝะพะณะพ ะธะทะปััะตะฝะธั ะธัั
ะพะดะฝะพ ะฑัะป ะฒัะฑัะฐะฝ ะฐะฝัะธะผะพะฝะธะด ะธะฝะดะธั (InSb), ััะตะฑะพะฒะฐะฒัะธะน ะดะปั ะฝะพัะผะฐะปัะฝะพะณะพ ััะฝะบัะธะพะฝะธัะพะฒะฐะฝะธั ัะฐะฑะพัะตะน ััะตะดั ะพั
ะปะฐะถะดัะฝะฝะพะน ะดะพ โ196 ยฐC. ะะปั ัะฐะฑะพัั ะฟัะธ ะฑะพะปะตะต ะฟัะธะตะผะปะตะผะพะน ัะตะผะฟะตัะฐัััะต โ73 ยฐC ะฑัะปะพ ะฟัะตะดะปะพะถะตะฝะพ ะธัะฟะพะปัะทะพะฒะฐัั ััััะฝะพ -ะบะฐะดะผะธะตะฒัะน ัะตะปะปััะธะด (HgCdTe), ะดะพััะฐัะพัะฝะพ ัะฐัะฟัะพัััะฐะฝัะฝะฝัะน ะฟัะธ ัะพะทะดะฐะฝะธะธ ะะกะ ัะฟัะฐะฒะปัะตะผัั
ัะฐะบะตั, ะฐ ัะฐะบะถะต ะฟัะธะผะตะฝัะตะผัะน ะฒ ะฟัะธะฑะพัะฐั
ะฝะพัะฝะพะณะพ ะฒะธะดะตะฝะธั [ 16]
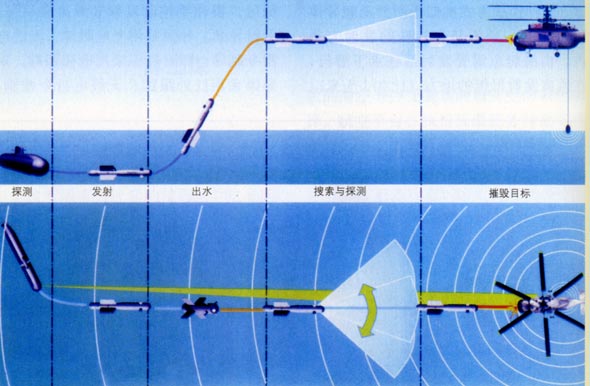
ะัะพะตะบัะพะผ ัะฐะบะถะต ะทะฐะธะฝัะตัะตัะพะฒะฐะปะพัั ะบะพะผะฐะฝะดะพะฒะฐะฝะธะต ะะะก ะกะจะ , ัะฐััะผะฐััะธะฒะฐะฒัะตะต ะฒะพะทะผะพะถะฝะพััั ะฟัะธะผะตะฝะตะฝะธั ัะฐะบะตั ะดะปั ัะฐะผะพะพะฑะพัะพะฝั ะฟะพะดะฒะพะดะฝัั
ะปะพะดะพะบ. ะัะตะดะฟะพะปะฐะณะฐะปะพัั, ััะพ ะฟะพะดะฒะพะดะฝะฐั ะปะพะดะบะฐ, ะฝะฐั
ะพะดััะฐััั ะฒ ัะฐะนะพะฝะต ะฒััะพะบะพะน ะฐะบัะธะฒะฝะพััะธ ะฟัะพัะธะฒะพะปะพะดะพัะฝะพะน ะฐะฒะธะฐัะธะธ ะฟัะพัะธะฒะฝะธะบะฐ, ัะผะพะถะตั ะพะฑะฝะฐััะถะธัั ะฟัะธะฑะปะธะถะฐััะธะนัั ัะฐะผะพะปัั ะธะปะธ ะฒะตััะพะปัั ะฟะพ ะฒะธะฑัะฐัะธัะผ ะทะฐะดะฐะฝะฝะพะน ะฐะผะฟะปะธััะดั ะฒ ัะพะปัะต ะฒะพะดั, ัะพะทะดะฐะฒะฐะตะผัะผ ะฟะพัะพะบะพะผ ะฒะพะทะดัั
ะฐ ะธะท-ะฟะพะด ะฒะธะฝัะฐ ะฒะตััะพะปััะฐ ะธะปะธ ััะผะพะผ ะดะฒะธะณะฐัะตะปะตะน ัะฐะผะพะปััะฐ, ะทะฐะฟัััะธั ะฝะฐ ะฟะพะฒะตัั
ะฝะพััั ะฒัะฟะปัะฒะฐััะธะน ะฑัะน ั SIAM. ะ ะพัะปะธัะธะต ะพั ะดััะณะธั
ัะบัะฟะตัะธะผะตะฝัะฐะปัะฝัั
ะฟะพะดั
ะพะดะพะฒ, ัะตะฐะปะธะทะพะฒะฐะฒัะธั
ะทะฐะฟััะบ ะทะตะฝะธัะฝัั
ัะฐะบะตั ะฝะตะฟะพััะตะดััะฒะตะฝะฝะพ ั ัะฐะผะพะน ะฟะพะดะฒะพะดะฝะพะน ะปะพะดะบะธ (ะธะท ัััะฐะฝะพะฒะบะธ ะฒะตััะธะบะฐะปัะฝะพะณะพ ะฟััะบะฐ ะธะปะธ ะธะท ัะพัะฟะตะดะฝะพะณะพ ะฐะฟะฟะฐัะฐัะฐ ), ะธะดะตั ะฟัะธะผะตะฝะตะฝะธั ะฒัะฟะปัะฒะฐััะตะณะพ ะฑัั ั SIAM ะฝะต ะดะตะผะฐัะบะธัะพะฒะฐะปะฐ ัะฐะผั ััะฑะผะฐัะธะฝั, ัะฐะบ ะบะฐะบ ะฑัะน ะฒัะฟะปัะฒะฐะป ะฝะตะทะฐะฒะธัะธะผะพ ะธ ะผะพะณ ะฑััั ะพัะฝะฐััะฝ ะฟัะพะณัะฐะผะผะธััะตะผัะผ ะฝะฐ ะทะฐะดะฐะฝะฝะพะต ะฒัะตะผั ะผะตั
ะฐะฝะธะทะผะพะผ ะทะฐะดะตัะถะบะธ. ะะฟะพัะปะตะดััะฒะธะธ, ัะฐะบัะธะบะพ-ัะตั
ะฝะธัะตัะบะพะต ะทะฐะดะฐะฝะธะต ะฑัะปะพ ะดะพะฟะพะปะฝะตะฝะพ ััะตะฑะพะฒะฐะฝะธัะผะธ ัะพะทะดะฐะฝะธั ััะตะดััะฒะฐ ะฟัะพัะธะฒะพะฒะพะทะดััะฝะพะน ะพะฑะพัะพะฝั ะฟะพะดะฒะพะดะฝัั
ะปะพะดะพะบ ะธ ะฝะฐะดะฒะพะดะฝัั
ะบะพัะฐะฑะปะตะน, ะฐ ัะฐะบะถะต ะพะฑัะตะบัะพะฒ ะฑะตัะตะณะพะฒะพะน ะธะฝััะฐััััะบัััั ัะปะพัะฐ.
ะขัะฐะตะบัะพัะธะธ ะธ ะฟัะพัะธะปั ะฟะพะปััะฐ ัะฐะบะตัั ะฟัะธ ัััะตะปัะฑะต ะฟะพ ะฟัะพัะธะฒะพะปะพะดะพัะฝัะผ ะฒะตััะพะปััะฐะผ
ะขัะฐะตะบัะพัะธะธ ะธ ะฟัะพัะธะปั ะฟะพะปััะฐ ัะฐะบะตัั ะฟัะธ ัััะตะปัะฑะต ะฟะพ ะฒะทะปะตัะฐััะธะผ ัะฐะผะพะปััะฐะผ
ะ ะฐะทัะฐะฑะพัะฐะฝะฝะฐั ัะธัะผะพะน ยซFordยป, SIAM ะฑัะปะฐ ะพัะตะฝั ะบะพะผะฟะฐะบัะฝะพะน ัะฐะบะตัะพะน. ะ ะดะฒะธะถะตะฝะธะต ะตั ะฟัะธะฒะพะดะธะป ัะฒะตัะดะพัะพะฟะปะธะฒะฝัะน ะดะฒะธะณะฐัะตะปั. ะะท-ะทะฐ ะดะพะฒะพะปัะฝะพ ะฝะตััะฐะฝะดะฐััะฝะพะน ะบะพะฝัะธะณััะฐัะธะธ ะะกะ, ะณะพะปะพะฒะฝะฐั ัะฐััั ัะฐะบะตัั ะฑัะปะฐ ะทะฝะฐัะธัะตะปัะฝะพ ะดะปะธะฝะฝะตะต ะธ ะฑะพะปััะต ะฟะพ ะพะฑััะผั ะฒะฝัััะตะฝะฝะตะณะพ ะฟัะพัััะฐะฝััะฒะฐ, ัะตะผ ั ัะฐะบะตั ะฐะฝะฐะปะพะณะธัะฝัั
ะณะฐะฑะฐัะธัะพะฒ. ะกัััะบัััะฝะพ ัะฐะบะตัะฐ ัะพััะพัะปะฐ ะธะท ะณะพะปะพะฒะฝะพะณะพ ะพััะตะบะฐ, ะฒ ะบะพัะพัะพะผ ัะฐะทะผะตัะฐะปัั ัะฐะดะธะพะปะพะบะฐัะธะพะฝะฝัะน ัะปะตะดััะธะน ะบะพะพัะดะธะฝะฐัะพั ัะตะปะธ (ะะ ะะกะ ) ะธ ะดะฐััะธะบ ัะตะปะธ ั ะฟัะตะดะพั
ัะฐะฝะธัะตะปัะฝะพ-ะธัะฟะพะปะฝะธัะตะปัะฝัะผ ะผะตั
ะฐะฝะธะทะผะพะผ, ััะปะตะฒะพะณะพ ะพััะตะบะฐ ั ะฒัะดะฒะธะถะฝัะผะธ ััะปะตะฒัะผะธ ะฟะพะฒะตัั
ะฝะพัััะผะธ, ะพััะตะบะฐ ัะฟัะฐะฒะปะตะฝะธั, ะฒ ะบะพัะพัะพะผ ะฑัะปะฐ ะทะฐะบะปััะตะฝะฐ ะฑะพััะพะฒะฐั ัะปะตะบััะพะฝะธะบะฐ ัะฐะบะตัั ั ะฑะธะฝะฐัะฝัะผ ะพะฟะตัะฐัะธะพะฝะฝะพ-ะปะพะณะธัะตัะบะธะผ ััััะพะนััะฒะพะผ , ะพัะฒะตัะฐััะธะผ ะทะฐ ะฒัั
ะพะด (ยซะฟัะพะฑัะถะดะตะฝะธะตยป) ัะฐะบะตัั ะธะท ัะตะถะธะผะฐ ะฒัะถะธะดะฐะฝะธั, ะฐะบัะธะฒะฐัะธั/ะดะตะฐะบัะธะฒะฐัะธั ะะกะ ะธ ะทะฐะฟััะบ ัะฐะบะตัั, ะพััะตะบะฐ ะฝะฐะฒะตะดะตะฝะธั ั ะธะฝััะฐะบัะฐัะฝัะผ ะฟะพะธัะบะพะฒัะผ ะพะฟัะธะบะพ-ัะปะตะบััะพะฝะฝัะผ ััััะพะนััะฒะพะผ ะฑะพะบะพะฒะพะณะพ ะพะฑะทะพัะฐ (ะะะะกะ ) ะฒะฝัััะธ, ะฑะพะตะฒะพะณะพ ะพััะตะบะฐ ั ะทะฐััะดะพะผ ะฒะทััะฒัะฐัะพะณะพ ะฒะตัะตััะฒะฐ ััะณะฐัะฝะพะณะพ ัะธะฟะฐ ะธ ะณะพัะพะฒัะผะธ ะฟะพัะฐะถะฐััะธะผะธ ัะปะตะผะตะฝัะฐะผะธ, ะดะฒะธะณะฐัะตะปัะฝะพะณะพ ะพััะตะบะฐ ั ะผะฐััะตะฒัะผ ะดะฒะธะณะฐัะตะปะตะผ ะฒะฝัััะธ ะธ ัะพะฟะปะพะฒะพะณะพ ะฑะปะพะบะฐ ั ะบะฐะผะตัะพะน ัะณะพัะฐะฝะธั ะธ ะฒัั
ะพะดะฝัะผ ัะฐััััะฑะพะผ ะฒะฝัััะธ, ะธ ะฒัะดะฒะธะถะฝัะผ ั
ะฒะพััะพะฒัะผ ะพะฟะตัะตะฝะธะตะผ (ะบััะปััะผะธ) ัะฝะฐััะถะธ. ะ ะฐะบะตัะฐ ะทะฐะฟััะบะฐะปะฐัั ะธะท ััะพััะตะณะพ ะฒะตััะธะบะฐะปัะฝะพ ัััะฑัะฐัะพะณะพ ะบะพะฝัะตะนะฝะตัะฐ (ะบะพัะพััะน ะฟัะตะดะฟะพะปะฐะณะฐะปะพัั ัะฑัะฐััะฒะฐัั ะฝะฐ ะฟะฐัะฐัััะฐั
ั ัะฐะผะพะปััะพะฒ), ะพัะฝะฐััะฝะฝะพะณะพ ะพะฟะพัะฐะผะธ ะดะปั ะฟัะฐะฒะธะปัะฝะพะน ัััะฐะฝะพะฒะบะธ ะฟัะธ ัะฑัะพัะต. ะะพะปะพะฒะฝะฐั ัะฐััั ัะฐะบะตัั ะฒััััะฟะฐะปะฐ ะธะท ะบะพะฝัะตะนะฝะตัะฐ ะฝะฐััะถั.
ะะพัะฒะปะตะฝะธะต ะฒ ะทะพะฝะต ะพะฑะฝะฐััะถะตะฝะธั ัะฐะผะพะปััะฐ ะฟัะพัะธะฒะฝะธะบะฐ ะฐะฒัะพะผะฐัะธัะตัะบะธ ะฐะบัะธะฒะธัะพะฒะฐะปะพ ะดะฒัั
ะดะธะฐะฟะฐะทะพะฝะฝัั ะณะพะปะพะฒะบั ัะฐะผะพะฝะฐะฒะตะดะตะฝะธั ัะฐะบะตัั, ัะตะฐะปะธะทะพะฒะฐะฒััั ะฒ ัะตะฑะต ัะตั
ะฝะพะปะพะณะธั ะฟะฐััะธะฒะฝะพะณะพ ะธะฝััะฐะบัะฐัะฝะพะณะพ ัะฐะผะพะฝะฐะฒะตะดะตะฝะธั ั ะฐะบัะธะฒะฝัะผ ัะฐะดะธะพะปะพะบะฐัะธะพะฝะฝัะผ ัะฐะผะพะฝะฐะฒะตะดะตะฝะธะตะผ , ะบะพัะพัะฐั ะฝะฐัะธะฝะฐะปะฐ ะพััะปะตะถะธะฒะฐัั ัะตะปั. ะัะปะธ ัะตะปั ะฟัะพะปะตัะฐะปะฐ ะผะธะผะพ, ะะกะ ะพัะบะปััะฐะปะฐัั ะธ ัะปะตะบััะพะฝะธะบะฐ ัะฐะบะตัั ะฒะฝะพะฒั ะฟะตัะตั
ะพะดะธะปะฐ ะฒ ัะตะถะธะผ ะพะถะธะดะฐะฝะธั. ะัะปะธ ัะตะปั ะพะบะฐะทัะฒะฐะปะฐัั ะฒ ัะฐะดะธััะต ะฟะพัะฐะถะตะฝะธั, ัะฐะบะตัะฐ ะฐะฒัะพะผะฐัะธัะตัะบะธ ะทะฐะฟััะบะฐะปะฐ ะดะฒะธะณะฐัะตะปั, ะฒัะปะตัะฐะปะฐ ะธะท ะบะพะฝัะตะนะฝะตัะฐ ะธ ัะฐะผะพะฝะฐะฒะพะดะธะปะฐัั ะฝะฐ ัะตะปั. ะะกะ ัะฐะฑะพัะฐะปะฐ ะฒ ัะตะถะธะผะต ะฐะบัะธะฒะฝะพะณะพ ัะฐะดะธะพะปะพะบะฐัะธะพะฝะฝะพะณะพ ัะฐะผะพะฝะฐะฒะตะดะตะฝะธั ะฝะฐ ะฝะฐัะฐะปัะฝะพะผ ะธ ะผะฐััะตะฒะพะผ ััะฐััะบะฐั
ััะฐะตะบัะพัะธะธ ะฟะพะปััะฐ ะธ ะฟะตัะตะบะปััะฐะปะพัั ะฝะฐ ัะตะถะธะผ ะฟะฐััะธะฒะฝะพะณะพ ะธะฝััะฐะบัะฐัะฝะพะณะพ ัะฐะผะพะฝะฐะฒะตะดะตะฝะธั ะฝะฐ ัะตัะผะธะฝะฐะปัะฝะพะผ ััะฐััะบะต[ 1]
ะฃัััะพะนััะฒะพ ัะฐะบะตัั, ะฟัะธะฝัะธะฟ ัะฐะฑะพัั ัะธััะตะผั ะฝะฐะฒะตะดะตะฝะธั ะธ ะณะฐะฑะฐัะธัะฝัะต ะฟะฐัะฐะผะตััั ัะฐะทะปะธัะฝัั
ะพััะตะบะพะฒ ัะฐะบะตัั
ะ 1980โ1981 ะณะพะดะฐั
ัะฐะบะตัะฐ ะฟัะพัะปะฐ ัะตัะธั ะธัะฟััะฐัะตะปัะฝัั
ะฟััะบะพะฒ ั ะฝะฐะทะตะผะฝัั
ะฟััะบะพะฒัั
ัััะฐะฝะพะฒะพะบ. ะะตัะฒัะน ะธัะฟััะฐัะตะปัะฝัะน ะฟััะบ ะพะฟััะฝะพะณะพ ะฟัะพัะพัะธะฟะฐ ะะฃะ ัะพััะพัะปัั ะฝะฐ ะฟะพะปะธะณะพะฝะต ยซะฃะฐะนั-ะกะตะฝะดะทยป ะฟะพ ะฑะตัะฟะธะปะพัะฝะพะผั ะฒะตััะพะปััั QH-50C , ะฟัะพะปะตัะฐะฒัะตะผั ะฝะฐ ะฒััะพัะต ะฟะพะปััะพัะฐ ััััั ัััะพะฒ (ะพะบะพะปะพ 460 ะผะตััะพะฒ) ะฒ ะดะฒัั
ะผะธะปัั
(ะพะบะพะปะพ 3220 ะผ) ะพั ััะฐััะพะฒะพะน ะฟะพะทะธัะธะธ, ะธ ะพัะฝะฐััะฝะฝะพะผั ะฟะธัะพะฟะฐััะพะฝะฐะผะธ ะดะปั ะธะผะธัะฐัะธะธ ะฒะพะทะดััะฝะพะน ัะตะปะธ [ 17]
ะััะพัะฝะธะบะธ ะธะฝัะพัะผะฐัะธะธ : Air Defense Systems ะัั
ะธะฒะฝะฐั ะบะพะฟะธั ะพั 14 ัะตะฒัะฐะปั 2017 ะฝะฐ Wayback Machine . / Edited by C. E. Howard. โ Cointrin, Switzerland: Interavia S.A., 1982. โ P. 89-90 โ 160 p. โ (The International Defense Review Special Series ; 14).ะะพััะณะฐะตะผะพััั ะฟะพ ะดะฐะปัะฝะพััะธ (ะฝะฐะบะปะพะฝะฝะพะน) โ ะดะพ 4500 ะผ
ะะตัะพััะฝะพะต ะฟัะพัััะฐะฝััะฒะตะฝะฝะพะต ะพัะบะปะพะฝะตะฝะธะต โ 0โฆ6 ะผ
ะะปะธะฝะฐ ัะฐะบะตัั โ 2500 ะผะผ
ะะธะฐะผะตัั ัะฐะบะตัั โ 145 ะผะผ
ะะฐััะฐ ัะฐะบะตัั โ 68 ะบะณ
ะัะตะผั ัะฐะฑะพัั ะดะฒะธะณะฐัะตะปั โ 22 ัะตะบ
โ 1 2 3 Autonomous Missile Demonstrated , Military Review , March 1981, v. 61, no. 3, p. 83, ISSN 00264148.โ 1 2 3 4 Varnado, 1974 , p. 9.โ 1 2 3 Varnado, 1974 , p. 5.โ Varnado, 1974 , p. 10.โ Varnado, 1974 , p. 25.โ Varnado, 1974 , pp. 2โ3.โ Varnado, 1974 , p. 59.โ 1 2 Varnado, 1974 , p. 19.โ Varnado, 1974 , p. 53.โ Varnado, 1974 , p. 11.โ Varnado, 1974 , p. 12.โ Varnado, 1974 , p. 14.โ Varnado, 1974 , p. 17.โ Varnado, 1974 , pp. 17โ19.โ 1 2 Varnado, 1974 , p. 22.โ Varnado, 1974 , p. 20.โ SIAM Nearly Severs Target on First Flight ะัั
ะธะฒะฝะฐั ะบะพะฟะธั ะพั 25 ะดะตะบะฐะฑัั 2017 ะฝะฐ Wayback Machine , Machine Design , April 24, 1980, v. 52, no. 9, p. 10, ISSN 00249114.
ยซะฒะพะทะดัั
-ะฒะพะทะดัั
ยป
ะผะฐะปะพะน ะธ ััะตะดะฝะตะน
ะฑะพะปััะพะน ะดะฐะปัะฝะพััะธ
ยซะฒะพะทะดัั
-ะบะพัะผะพัยป
ยซะฟะพะฒะตัั
ะฝะพััั-ะฟะพะฒะตัั
ะฝะพัััยป
ะบะพะผะฑะธะฝะธัะพะฒะฐะฝะฝัะต
ยซะฒะพะทะดัั
-ะฟะพะฒะตัั
ะฝะพัััยป
ัััะฐัะตะณะธัะตัะบะธะต
ยซะฟะพะฒะตัั
ะฝะพััั-ะฒะพะทะดัั
ยป
ะัััะธะฒะพะผ ะฒัะดะตะปะตะฝั ะฟะตััะฟะตะบัะธะฒะฝัะต, ะพะฟััะฝัะต ะธะปะธ ะฝะต ะฟะพัะตะดัะธะต ะฒ ัะตัะธะนะฝะพะต ะฟัะพะธะทะฒะพะดััะฒะพ ะพะฑัะฐะทัั. ะะฐัะธะฝะฐั ั 1986-ะณะพ ะณะพะดะฐ ะดะปั ะพะฑะพะทะฝะฐัะตะฝะธั ััะตะดั/ัะตะปะธ ะทะฐะฟััะบะฐ ะฒ ะธะฝะดะตะบัะต ััะฐะปะธ ะธัะฟะพะปัะทะพะฒะฐัั ะปะธัะตัั. ยซAยป ะดะปั ะฒะพะทะดััะฝัั
ััะตะดััะฒ, ยซBยป โ ะผะฝะพะถะตััะฒะตะฝะฝะพััั ััะตะด ะทะฐะฟััะบะฐ, ยซRยป ะดะปั ะฝะฐะดะฒะพะดะฝัั
ะบะพัะฐะฑะปะตะน, ยซUยป ะดะปั ะฟะพะดะฒะพะดะฝัั
ะปะพะดะพะบ ะธ ะดั.

_(3).jpg)


_-_submarine_defense_task.svg)
_-_airfield_denial_task.svg)

{kind=link}
{kind=link}